俹俬俠俛俙俽俬俠僐儞僷僀儔
乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣
傑傞偱僀儞僞僾儕僞丅偱傕僐儞僷僀儔偱偡丅挻僇儞僞儞挻僔儞僾儖偱偡丅
乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣
乵戞俆俆夞乶
仠俙俽俵丆俤俶俢俙俽俵
傾僙儞僽儔丂倝値丂俛俙俽俬俠偺巊偄曽偱偡丅
俹俬俠俛俙俽俬俠僐儞僷僀儔偱偼俛俙俽俬俠僾儘僌儔儉偼峴斣崋傪偮偗偰婰弎偟傑偡丅
傾僙儞僽儔傕摨偠偱偡丅
俛俙俽俬俠偲摨偠傛偆偵峴斣崋傪偮偗偰俹俬俠偺傾僙儞僽儔柦椷傪彂偒傑偡丅
偨偩偦偺傛偆偵偡傞偩偗偩偲俛俙俽俬俠偺柦椷偲俹俬俠偺傾僙儞僽儔柦椷偑崿嵼偡傞偙偲偵側偭偰偟傑偄傑偡偐傜丄偦偙傪岎捠惍棟偡傞偨傔偵傾僙儞僽儔偺柦椷峴偺慜偵俙俽俵柦椷傪抲偒丄傾僙儞僽儔傪廔椆偡傞偲偙傠偵俤俶俢俙俽俵柦椷傪抲偒傑偡丅
壓偺傛偆側僀儊乕僕偵側傝傑偡丅
侾侽丂俛俙俽俬俠暥
丂丂丂丗丂丂丂丂偙偺娫偼晛捠偵俛俙俽俬俠偺柦椷暥傪彂偒傑偡
侾侽侽丂俙俽俵
丂丂丂丗丂丂丂丂偙偺娫偼俹俬俠偺傾僙儞僽儔柦椷暥傪彂偒傑偡
俀侽侽丂俤俶俢俙俽俵
丂丂丂丗丂丂丂丂偙傟埲屻偼晛捠偵俛俙俽俬俠偺柦椷暥傪彂偒傑偡
幚嵺偺僾儘僌儔儉椺偱帵偟傑偡丅
10 'asmtest
20 TRISC=0
30 asm
40 *loop
50 incf PORTC
60 goto loop
70 endasm
|
偱偒傞偩偗娙扨側僾儘僌儔儉偵偟傛偆偲偟偨偨傔娙扨偵偟偡偓傑偟偨丅
偙傟偼梋傝偄偄椺偱偼偁傝傑偣傫偹丅
偺偪傎偳傑偨暿偺僒儞僾儖僾儘僌儔儉傪偍尒偣偡傞偮傕傝偱偡丅
侾侽峴乣俁侽峴偑俛俙俽俬俠偺僾儘僌儔儉峴偱偡丅
乫倎倱倣乫偦偺傕偺偼俛俙俽俬俠偺柦椷偱偡丅
偙傟埲屻偼俹俬俠傾僙儞僽儔偺婰弎偵側傝傑偡偲偄偆愰尵暥偱偡丅
俈侽峴偺倕値倓倎倱倣傕俛俙俽俬俠偺柦椷偱偡丅
偙傟埲屻偼俛俙俽俬俠偺柦椷暥偱偡偲偄偆愰尵暥偱偡丅
偙偺僾儘僌儔儉偼偙偙偱廔偭偰偄傑偡丅
偙偺椺偺応崌俹俬俠偺傾僙儞僽儔僾儘僌儔儉偑乽柍尷儖乕僾乿偵側偭偰偄傞偺偱偦傟傛傝屻傠偵壗傪彂偄偰傕柍懯偵側偭偰偟傑偆偐傜偱偡丅
晛捠偼偙偺屻傠偵傑偨俛俙俽俬俠偺僾儘僌儔儉傪彂偔偙偲偵側傝傑偡丅
偝傜偵偦傟偐傜偁偲偵傑偨倎倱倣乣倕値倓倎倱倣傪彂偔偙偲傕偱偒傑偡丅
係侽峴乣俇侽峴偑俹俬俠傾僙儞僽儔偺柦椷峴偱偡丅
俹俬俠傾僙儞僽儔偺儖乕儖偱偼儔儀儖偲柦椷偼婰弎偡傞寘埵抲偵傛偭偰嬫暿偝傟傑偡丅
俹俬俠傾僙儞僽儔偱偼儔儀儖偼侾寘栚偐傜婰弎偟傑偡丅
傾僙儞僽儔偺柦椷偼俀寘栚埲屻偵婰弎偟傑偡丅
偟偐偟俹俬俠俛俙俽俬俠僐儞僷僀儔偱偼寘埵抲偵傛傞嬫暿偼偟側偄偺偱柦椷暥偲儔儀儖傪嬫暿偡傞偨傔偵儔儀儖偺応崌偵偼愭摢偵仏傪偮偗偰帵偟傑偡丅
俇侽峴偺俧俷俿俷暥偼俛俙俽俬俠偲摨偠柦椷暥偱偡偑乫倎倱倣乫偲乫倕値倓倎倱倣乫偺娫偵偁傝傑偡偐傜偙偺応崌偵偼俹俬俠傾僙儞僽儔偺柦椷偱偡丅
俧俷俿俷暥偵偮偄偰偼偨傑偨傑俛俙俽俬俠偲俹俬俠傾僙儞僽儔偱摨偠柦椷暥偵側偭偰偄傑偡偑偦偙偼僐儞僷僀儔偲傾僙儞僽儔偱嬫暿偟偰擣幆偝傟傑偡丅
俛俙俽俬俠偺俧俷俿俷暥偱乫倎倱倣乫乣乫倕値倓倎倱倣乫偺娫偺峴偵峴偔偙偲偼偱偒傑偣傫丅
摨條偵俹俬俠傾僙儞僽儔偺倗倧倲倧暥偱俛俙俽俬俠偺柦椷峴偵峴偔偙偲傕偱偒傑偣傫丅
乫倎倱倣乫偲乫倕値倓倎倱倣乫偱埻偭偨拞偼偄傢偽乽暬偺拞乿偱偦偺撪偲奜偺峴偒棃偼偱偒傑偣傫丅
乫倎倱倣乫偑俹俬俠傾僙儞僽儔偺擖岥偱乫倕値倓倎倱倣乫偑弌岥偱偡丅
壓偼忋偺俛俙俽俬俠亄傾僙儞僽儔僾儘僌儔儉傪俹俬俠俛俙俽俬俠僐儞僷僀儔偵偐偗偨寢壥嶌惉偝傟偨俹俬俠傾僙儞僽儔僜乕僗僾儘僌儔儉僼傽僀儖乮倎倱倣僼傽僀儖乯偱偡丅
; 10 'asmtest
; 20 TRISC=0
movlw D'0'
movwf TRISC
; 30 asm
; 40 *loop
loop
; 50 incf PORTC
incf PORTC
; 60 goto loop
goto loop
; 70 endasm
|
俀侽峴偺俛俙俽俬俠暥俿俼俬俽俠亖侽偼偦偺壓偵昞帵偝傟偰偄傞俀峴偺俹俬俠傾僙儞僽儔柦椷偵東栿偝傟偰偄傑偡偑俁侽峴偺倎倱倣偲俈侽峴偺倕値倓倎倱倣偺娫偺暥偼偦偺傑傑俹俬俠傾僙儞僽儔偺柦椷偵側偭偰偄傑偡丅
偙偺俹俬俠傾僙儞僽儔僜乕僗僽儘僌儔儉僼傽僀儖偼俹俬俠傾僙儞僽儔偵傛偭偰撉傒崬傑傟丄壓偺俹俬俠傾僙儞僽儔儕僗僩僼傽僀儖乮俴俬俽俿僼傽僀儖乯偲俹俬俠儅僔儞岅僐乕僪僼傽僀儖乮俛俬俶僼傽僀儖乯偑嶌惉偝傟傑偟偨丅
2040 ; 10 'asmtest
2040 ; 20 TRISC=0
2040 000e movlw D'0'
2042 946e movwf TRISC
2044 ; 30 asm
2044 ; 40 *loop
2044 loop
2044 ; 50 incf PORTC
2044 822a incf PORTC
2046 ; 60 goto loop
2046 22ef goto loop
2048 10f0
204a ; 70 endasm
|
俹俬俠偺傾僙儞僽儔柦椷偑儅僔儞岅僐乕僪偵東栿偝傟偰偄傑偡丅
幚嵺偵偼忋偺僼傽僀儖偺嶌惉偼俛俙俽俬俠僜乕僗僾儘僌儔儉傪俴俷俙俢偡傞偲俹俬俠俛俙俽俬俠僐儞僷僀儔偵傛偭偰帺摦揑偵峴側傢傟傑偡丅
壓偼偦偺夋柺偱偡丅
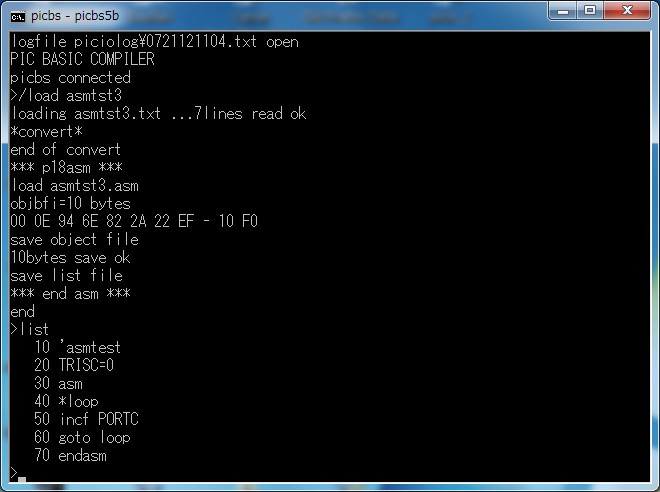
乛倢倧倎倓偱俛俙俽俬俠僜乕僗僾儘僌儔儉丂倎倱倣倲倱倲俁丏倲倶倲丂傪儘乕僪偡傞偲俹俬俠俛俙俽俬俠僐儞僷僀儔偑婲摦偟偰丄偙偺夋柺偐傜偼傢偐傝傑偣傫偑仏們倧値倴倕倰倲仏偺偲偙傠偱倎倱倣僼傽僀儖乮倎倱倣倲倱倲俁丏倎倱倣乯偑嶌惉偝傟偰偄傑偡丅
偦偺偁偲仏仏仏丂倫侾俉倎倱倣丂仏仏仏偺偲偙傠偱俹俬俠傾僙儞僽儔偑婲摦偟偰倎倱倣倲倱倲俁丏倎倱倣傪撉傒崬傫偱儅僔儞岅僐乕僪僼傽僀儖乮倐倝値僼傽僀儖丄夋柺偱偼倧倐倞們倲丂倖倝倢倕偲昞尰偝傟偰偄傞乯偲傾僙儞僽儔儕僗僩僼傽僀儖乮倢倝倱倲丂倖倝倢倕乯偑嶌惉偝傟傑偟偨丅
偦偺偁偲擮偺偨傔偵俴俬俽俿僐儅儞僪偱俛俙俽俬俠僾儘僌儔儉偺昞帵傪峴側偄傑偟偨丅
乛倰倳値僐儅儞僪傪擖椡偡傞偲忋偱惗惉偝傟偨俹俬俠儅僔儞岅僐乕僪偑俹俬俠僞乕僎乕僩儃乕僪偺俹俬俠乮崱夞偼俹俬俠侾俉俥係俆俆侽乯偵彂偒崬傑傟偨偁偲偨偩偪偵幚峴偝傟傑偡丅
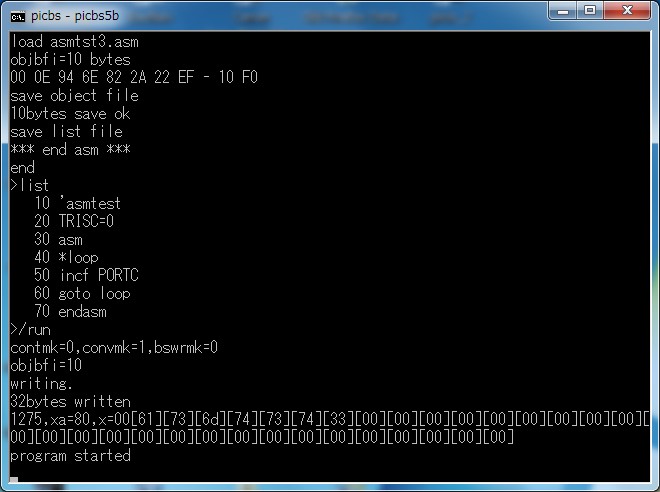
俹俬俠偺儅僔儞岅僾儘僌儔儉偑柍尷儖乕僾偵側偭偰偄傞偨傔倫倰倧倗倰倎倣丂倱倲倎倰倲倕倓偲昞帵偝傟偨偁偲倂倝値倓倧倵倱偺僐儅儞僪僾儘儞僾僩夋柺偼偦偙偱掆巭偟偨忬懺偵側傝傑偡丅
傕偪傠傫偙偺偲偒俹俬俠僞乕僎僢僩儃乕僪偺懁偼彂偒崬傑傟偨儅僔儞岅僾儘僌儔儉傪幚峴拞偱偡丅
偦偺儅僔儞岅僾儘僌儔儉偼俹俬俠侾俉俥係俆俆侽偺俹俷俼俿俠偺弌椡傪亄侾偢偮僇僂儞僩傾僢僾偟俥俥偵側偭偨傜侽侽偵栠偭偰僇僂儞僩傪孞傝曉偡傕偺偱偡丅
壓偼俹俷俼俿俠偺價僢僩侽偲價僢僩侾偺弌椡傪僆僔儘僗僐乕僾偱娤應偟偨幨恀偱偡丅
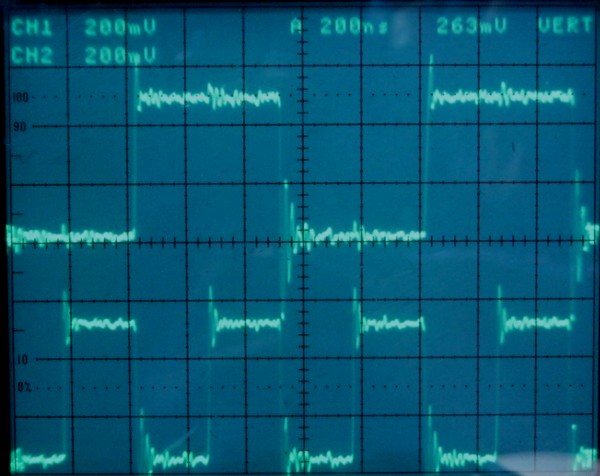
忋懁乮俠俫侾乯偑價僢僩侾乮俼俠侾乯偱壓懁乮俠俫俀乯偑價僢僩侽乮俼俠侽乯偺弌椡攇宍偱偡丅
崅懍僷儖僗偑弌椡偝傟偰偄傞偺偱偐側傝嫮偄儕儞僊儞僌偑弌偰偄傑偡丅
悈暯帪娫幉傪奼戝偟傑偟偨丅
俹俬俠侾俉俥係俆俆侽俛俙俽俬俠僐儞僷僀儔儃乕僪偼侾俀俵俫倸悈徎敪怳傪撪晹俹俴俴夞楬偱係俉俵俫倸偵偟偰偦傟傪僔僗僥儉僋儘僢僋偵偟偰偄傑偡丅
俹俬俠偺柦椷僋儘僢僋偼偦偺侾乛係偺侾俀俵俫倸偱偡丅
俹俬俠侾俉俥係俆俆侽偵彂偒崬傫偩儅僔儞岅僾儘僌儔儉偼壓偺俀偮偺柦椷偺孞傝曉偟偱偡丅
倢倧倧倫
丂丂丂倝値們倖丂俹俷俼俿俠
丂丂丂倗倧倲倧丂倢倧倧倫
倝値們倖丂俹俷俼俿俠偼侾柦椷僋儘僢僋偱倗倧倲倧丂倢倧倧倫偼俀柦椷僋儘僢僋偱偡丅
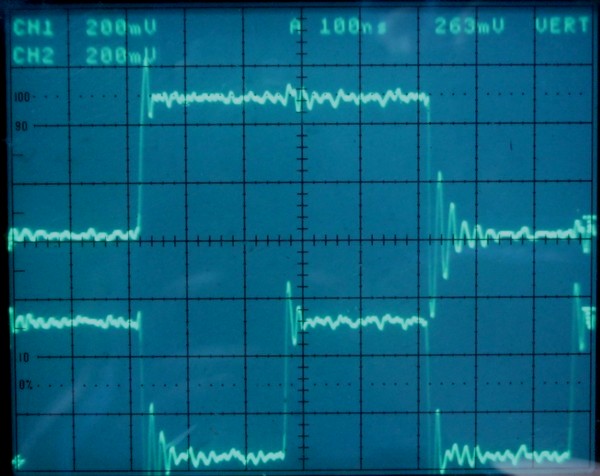
侾夞偺孞傝曉偟偼俁柦椷僋儘僢僋偱偡偐傜偦偺幚峴帪娫偼
侾乛侾俀仏俁亖侽丏俀俆兪倱
偵側傝傑偡丅
忋偺僆僔儘僗僐乕僾偺夋憸偱尒傞偲偪傚偆偳寁嶼捠傝偺僶儖僗攇宍偱偁傞偙偲偑傢偐傝傑偡丅
偲偙傠偱丅
俹俬俠侾俉俥係俆俆侽偼偨偭偨俀柦椷偺抁偄儅僔儞岅偺柍尷儖乕僾僾儘僌儔儉傪幚峴偟偰偄傑偡偐傜晛捠偼儕僙僢僩傪偐偗傞偟偐偙偺僾儘僌儔儉傪巭傔傞偙偲偼偱偒傑偣傫丅
偟偐偟丄俹俬俠俛俙俽俬俠僐儞僷僀儔僔僗僥儉側傜偽偱偒偰偟傑偄傑偡丅
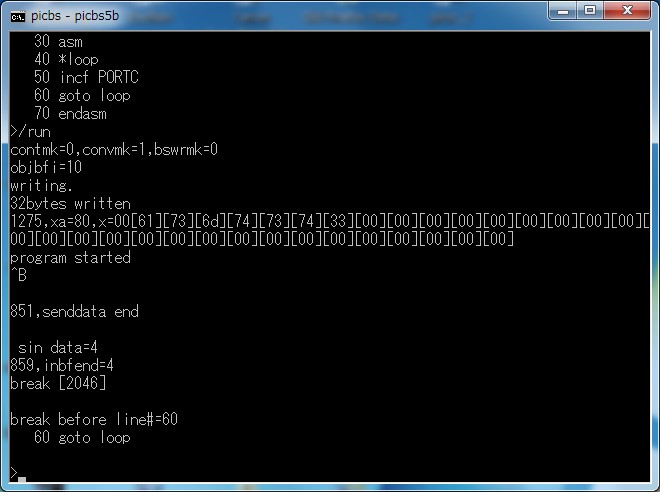
倫倰倧倗倰倎倣丂倱倲倎倰倲倕倓偺昞帵偱巭傑偭偰偄偨夋柺偱偡偑乵俠倲倰倢乶乵俠乶偲乵俠倲倰倢乶乵俛乶偩偗偼擖椡偱偒傑偡丅
乵俠倲倰倢乶乵俛乶傪擖椡偡傞偲丄俹俬俠侾俉俥係俆俆侽儃乕僪偑僽儗乕僋偟偰僐儅儞僪僾儘儞僾僩偵惂屼偑栠傝傑偟偨丅
僨僶僢僌偺偨傔偺儊僢僙乕僕偑昞帵偝傟偰偄偰傢偐傝偵偔偔側偭偰偄傑偡丅
倐倰倕倎倠丂乵俀侽係俇乶
偼傾僪儗僗俀侽係俇偱僽儗乕僋偟偨偙偲傪帵偟偰偄傑偡丅
偦偟偰偦傟偼
僜乕僗僾儘僌儔儉偱偼俇侽峴偺幚峴捈慜偱偁傞偲偄偆昞帵偑弌偰偄傑偡丅
偙偺傛偆偵儅僔儞岅僾儘僌儔儉偺幚峴拞偱傕僽儗乕僋偱偒傞偺偱偦偙偱僾儘僌儔儉偺僨僶僢僌側偳傪峴側偆偙偲偑偱偒傑偡丅
偁偁丄偦偆偱偟偨丅
偙偺懕偒偑偁偭偨偺偱偟偨丅
忋偺夋柺偱廔椆偟偰偟傑偄傑偟偨偺偱傕偆堦搙婲摦偟偰懕偒傪幚峴偟偰傒傑偡丅
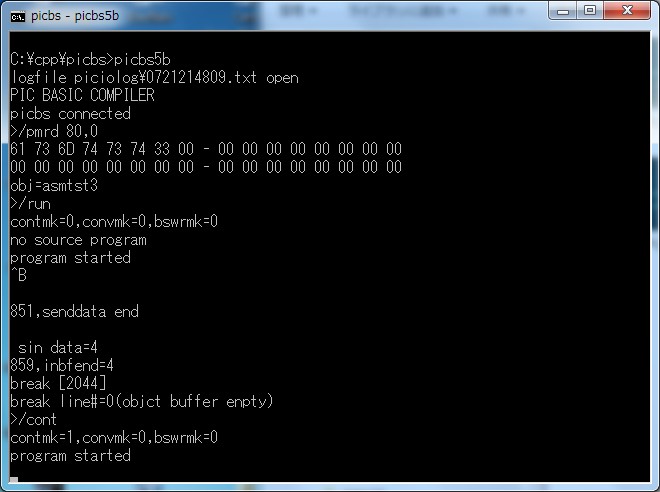
僔僗僥儉傪婲摦偟偨偲偒偵倀俽俛愙懕偟偰偄傞俹俬俠僞乕僎僢僩儃乕僪偺俹俬俠偵僾儘僌儔儉偑彂偒崬傒嵪傒偺応崌偵偼
乛倫倣倰倓丂俉侽丆侽
傪幚峴偡傞偲彂偒崬傒嵪傒偺僾儘僌儔儉柤偑昞帵偝傟傑偡丅
偙偺婡擻偼乵戞俆俁夞乶偱徯夘偟傑偟偨丅
僾儘僌儔儉偼彂偒崬傒嵪傒偱偡偐傜乛倰倳値僐儅儞僪偱捈偪偵幚峴偝偣傜傟傑偡丅
偦偺偁偲乵俠倲倰倢乶乵俛乶偺擖椡偱僽儗乕僋偝偣偨偲偙傠傑偱偑偝偒傎偳愢柧偟偨偲偙傠偱偡丅
偙偙偱偦偺偁偲
乛們倧値倲
傪擖椡偡傞偙偲偱僽儗乕僋偟偨偲偙傠偐傜僾儘僌儔儉傪嵞奐偝偣傞偙偲偑偱偒傑偡丅
傕偪傠傫偦偺偁偲乵俠倲倰倢乶乵俛乶偱嵞傃僽儗乕僋偝偣傞偙偲傕偱偒傑偡丅
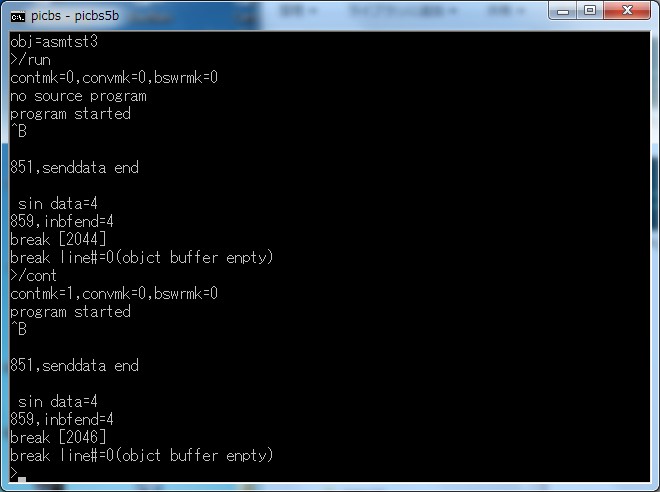
儅僔儞岅僾儘僌儔儉傪幚峴偟偰偄傞偲偄偆姶偠偼偁傝傑偣傫偱偟傚偆丅
傕偆傑傞偱僀儞僞僾儕僞傪幚峴偟偰偄傞傛偆側姶偠偱偡丅
俹俬俠俛俙俽俬俠僐儞僷僀儔偼側偐側偐偺桪傟傕偺側偺偱偡丅
俹俬俠俛俙俽俬俠僐儞僷僀儔乵戞俆俆夞乶
俀侽俀俁丏俈丏俀侾倳倫倢倧倎倓
慜傊
師傊
儂乕儉儁乕僕僩僢僾傊栠傞