侾俇價僢僩儅僀僐儞儃乕僪偺惢嶌
乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣
偄偮偐巊偭偰傒傞偮傕傝偱擖庤偟偰偦偺傑傑抲偄偰偁偭偨侾俇價僢僩俠俹倀偺偙偲傪巚偄弌偟傑偟偨丅
俙俵俢幮偺俙俵侾俉俉偱偡丅
偦偺柤偺捠傝丄俠俹倀僐傾偼俉侽侾俉俉屳姺偺侾俇價僢僩俠俹倀偱偡丅
偦偺俙俵侾俉俉傪巊偭偨侾俇價僢僩儅僀僐儞儃乕僪偺惢嶌婰帠偱偡丅
乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣
乵戞俀侽夞乶
仠俿俲亅俉侽儌僯僞揑摦嶌偺妋擣
娙扨側僥僗僩僾儘僌儔儉傪梡堄偟傑偟偨丅
俬乛俷億乕僩乮俉俀俠俆俆乯偵弌椡偡傞偩偗偺娙扨側僾儘僌儔儉偱偡丅
;;; i/o test
;18/5/17
ORG=8000
;
LOOP:MOV AL,55
OUT 82,AL
MOV AL,44
OUT 82,AL
JMP LOOP
;
|
傑傞偱俉侽俉侽偺僯乕儌僯僢僋偦偺傑傑偱偡丅
偨偩傛偔尒傞偲儗僕僗僞柤偑俙俴偵側偭偰偄傞偺偱丄俉侽俉侽偱偼側偄側丄偲傢偐傞掱搙偱偡丅
傕偪傠傫偙傟偼傾僙儞僽儔偺僯乕儌僯僢僋昞婰偱偡偐傜丄偙偺傑傑偱偼幚峴偼偱偒傑偣傫丅
偙傟傪儅僔儞岅偵曄姺偡傞昁梫偑偁傝傑偡丅
俉侽俉侽傗倅俉侽偱偟偨傜丄偙偺掱搙偺僾儘僌儔儉偼偄偒側傝儅僔儞岅僐乕僪偱傕彂偗偰偟傑偄傑偡丅
偊偊丅
巹傕偙偺掱搙偺儅僔儞岅僐乕僪偼偡傜偡傜弌偰偒傑偡丅
俁俤丂俆俆丂俢俁丂俉俀丂俁俤丂係係丂俢俁丂俉俀丂俠俁丂侽侽丂俉侽
偱偡丅
偟偐偟俉侽俉俇偲側傞偲丄娙扨側僾儘僌儔儉偱傕僴儞僪傾僙儞僽儖偼崲擄偱偡丅
僯乕儌僯僢僋偼俉侽俉侽偲帡偰偄偰傕儅僔儞岅僐乕僪偼慡偔堎側傝傑偡丅
堦斣栤戣側偺偼僕儍儞僾柦椷偺傾僪儗僗偑憡懳昞婰偱偁傞偙偲偱偡丅
僯乕儌僯僢僋偱彂偗偽
俰俵俹丂俴俷俷俹偱偡丅
俴俷俷俹偼俉侽侽侽斣抧偱偡偐傜丄俉侽俉侽乮倅俉侽乯偺儅僔儞岅偱偼俠俁侽侽俉侽偵側傝傑偡丅
偮傑傝愨懳傾僪儗僗昞婰偱偡丅
偟偐偟俉侽俉俇偺応崌偵偼憡懳傾僪儗僗昞婰偱偡偐傜丄仜僶僀僩慜偵丄偁傞偄偼仜僶僀僩愭偵僕儍儞僾偡傞丄偲偄偆傛偆側昞婰偵側傝傑偡丅
偦傟傪偄偪偄偪寁嶼偱媮傔傞偺偱偼戝曄偱偡丅
偦偆丅
俉侽俉俇偱偼傾僙儞僽儔偑昁恵偱偡丅
忋偺僾儘僌儔儉乮僜乕僗僾儘僌儔儉乯傪傾僙儞僽儔偵偐偗偰偄傞偲偙傠偼慜夞偍尒偣偟傑偟偨丅
偊丠
婥偑晅偐側偐偭偨側偁丄偲尵傢傟傞曽偺偨傔偵傕偆堦搙偍尒偣偟傑偡丅
倎倱倣俉俇丂倝倧倲倕倱倲侾丏倲倶倲
偑偦傟偱偡丅
俙俽俵俉侽丏俠俷俵偼巹偑嶌偭偨帺嶌偺俉侽俉俇傾僙儞僽儔偱偡丅
慜夞傕彂偒傑偟偨傛偆偵丄埖偄傕挻娙扨偱偡丅
儕儞僇側偳傕晄梫偱偡丅
侾僷僗偱僆僽僕僃僋僩僐乕僪傪惗惉偟傑偡丅
壓偑嶌惉偝傟偨傾僙儞僽儖儕僗僩偱偡丅
偙偺儕僗僩僼傽僀儖偲偲傕偵幚峴僼傽僀儖乮俠俷俵僼傽僀儖乯偑嶌惉偝傟傑偡丅
2018/5/17 7:226 iotest1.LST
[00001] ;;; i/o test
[00002] ;18/5/17
[00003] ORG=8000
[00004] ;
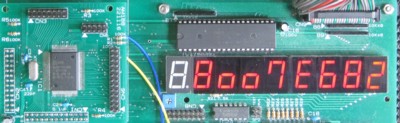
[00005] 8000 B055 LOOP:MOV AL,55
[00006] 8002 E682 OUT 82,AL
[00007] 8004 B044 MOV AL,44
[00008] 8006 E682 OUT 82,AL
[00009] 8008 EBF690 JMP LOOP <8000>
[00010] ;
LOOP =8000
|
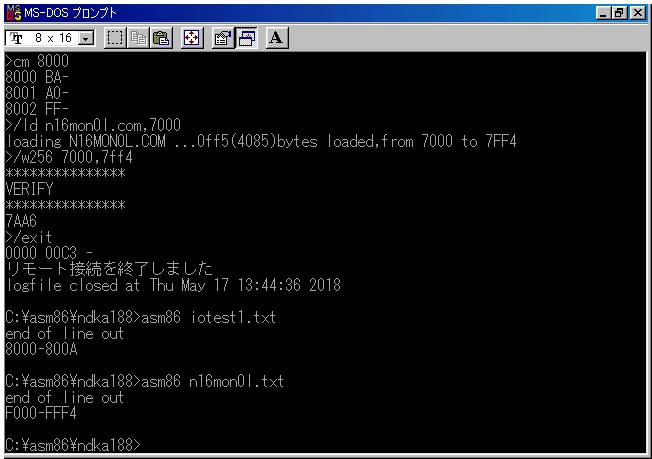
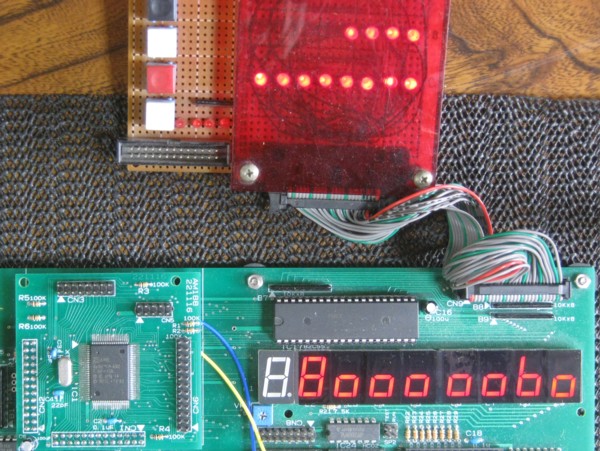
崱夞偼俿俲亅俉侽儌僯僞晽僾儘僌儔儉偺摦嶌僥僗僩偱偡偐傜丄偙偺儕僗僩傪尒側偑傜儅僔儞岅僐乕僪傪擖椡偟偰偄偒傑偡丅
偙傟偐傜僥僗僩傪偡傞偨傔偵僗僞儞僶僀拞偺俶俢俉侽俲俴乛俉俇帋嶌儃乕僪偱偡丅
俉俀俠俆俆偵僨乕僞弌椡偟傑偡偐傜丄俬乛俷弌椡僐僱僋僞偵俴俤俢昞帵儃乕僪傪愙懕偟偰偄傑偡丅
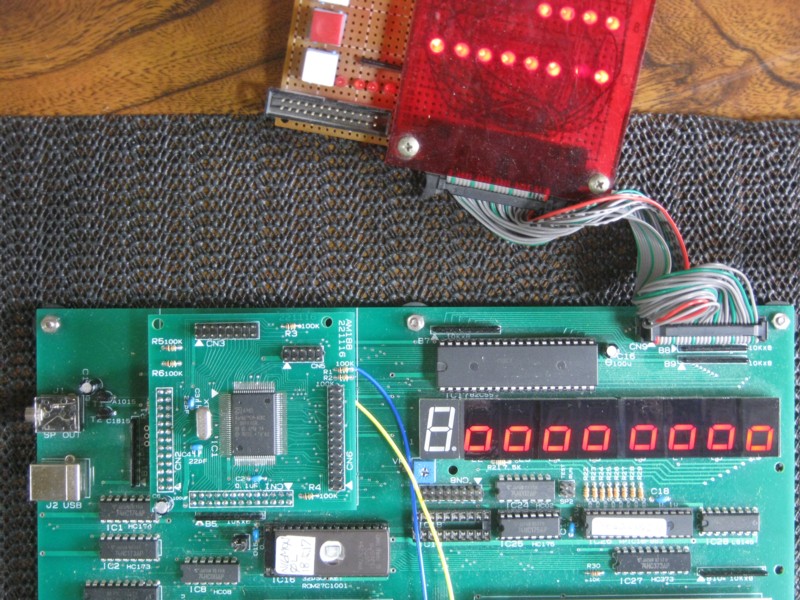
俙俵侾俉俉俠俹倀婎斅傪幚憰偟偰僷儚乕僆儞偟偨偲偙傠偱偡丅
偙傟偐傜儅僔儞岅僐乕僪傪擖椡偟偰偄偒傑偡丅
乵俉乶乵侽乶乵侽乶乵侽乶乵俙俢俼俽俽俤俿乶偵懕偄偰乵俛乶乵侽乶偲僉乕擖椡偟傑偟偨丅
偦偺偁偲乵倂俼俬俿俤俬俶俠乶傪擖椡偟丄
乵俆乶乵俆乶傪擖椡偟傑偟偨丅
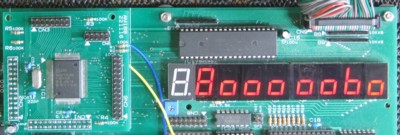
乵倂俼俬俿俤俬俶俠乶偵懕偄偰
乵俤乶乵俇乶傪擖椡偟傑偟偨丅
乵倂俼俬俿俤俬俶俠乶偵懕偄偰
乵俉乶乵俀乶傪擖椡偟傑偟偨丅

乵倂俼俬俿俤俬俶俠乶偵懕偄偰
乵俛乶乵侽乶傪擖椡偟傑偟偨丅
乵倂俼俬俿俤俬俶俠乶偵懕偄偰
乵係乶乵係乶傪擖椡偟傑偟偨丅
乵倂俼俬俿俤俬俶俠乶偵懕偄偰
乵俤乶乵俇乶傪擖椡偟傑偟偨丅
乵倂俼俬俿俤俬俶俠乶偵懕偄偰
乵俉乶乵俀乶傪擖椡偟傑偟偨丅
乵倂俼俬俿俤俬俶俠乶偵懕偄偰
乵俤乶乵俛乶傪擖椡偟傑偟偨丅

乵倂俼俬俿俤俬俶俠乶偵懕偄偰
乵俥乶乵俇乶傪擖椡偟傑偟偨丅

乵倂俼俬俿俤俬俶俠乶偵懕偄偰
乵俋乶乵侽乶傪擖椡偟傑偟偨丅
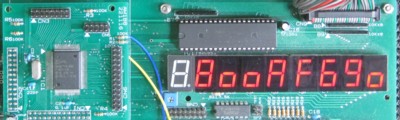
乵倂俼俬俿俤俬俶俠乶偵懕偄偰
乵俉乶乵侽乶乵侽乶乵侽乶乵俙俢俼俽俽俤俿乶傪擖椡偟傑偟偨丅
偙偙傑偱丄俿俲亅俉侽儌僯僞偺憖嶌偲摨偠偱偡丅
偙偺偁偲乵俼倀俶乶僉乕偺擖椡偱僾儘僌儔儉偑幚峴偝傟傑偡丅
偟偐偟崱夞偺僥僗僩僾儘僌儔儉偼俉侽俠俆俆偺俠億乕僩偵俆俆偲係係傪岎屳偵崅懍偱弌椡偡傞偩偗偺柍尷儖乕僾僾儘僌儔儉偱偡偐傜丄偨偩幚峴偡傞偩偗偱偼僥僗僩僾儘僌儔儉偲偟偰偼梋傝堄枴偺偁傞傕偺偵偼側傝傑偣傫丅
幚偼偙偺僾儘僌儔儉偼暿偵栚揑偑偁偭偰嶌惉偟偨偺偱偡丅
偦傟偼丠
僗僥僢僾摦嶌偱偡丅
俉侽俉俇偺僗僥僢僾摦嶌傪僥僗僩偡傞偺偑栚揑偱偡丅
師夞偵懕偒傑偡丅
侾俇價僢僩儅僀僐儞儃乕僪偺惢嶌乵戞俀侽夞乶
俀侽侾俉丏俆丏侾俋倳倫倢倧倎倓
慜傊
師傊
儂乕儉儁乕僕僩僢僾傊栠傞