�P�U�r�b�g�}�C�R���{�[�h�̐���
�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`
�����g���Ă݂����œ��肵�Ă��̂܂ܒu���Ă������P�U�r�b�g�b�o�t�̂��Ƃ��v���o���܂����B
�`�l�c�Ђ̂`�l�P�W�W�ł��B
���̖��̒ʂ�A�b�o�t�R�A�͂W�O�P�W�W�݊��̂P�U�r�b�g�b�o�t�ł��B
���̂`�l�P�W�W���g�����P�U�r�b�g�}�C�R���{�[�h�̐���L���ł��B
�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`�`
�m��V�T��n
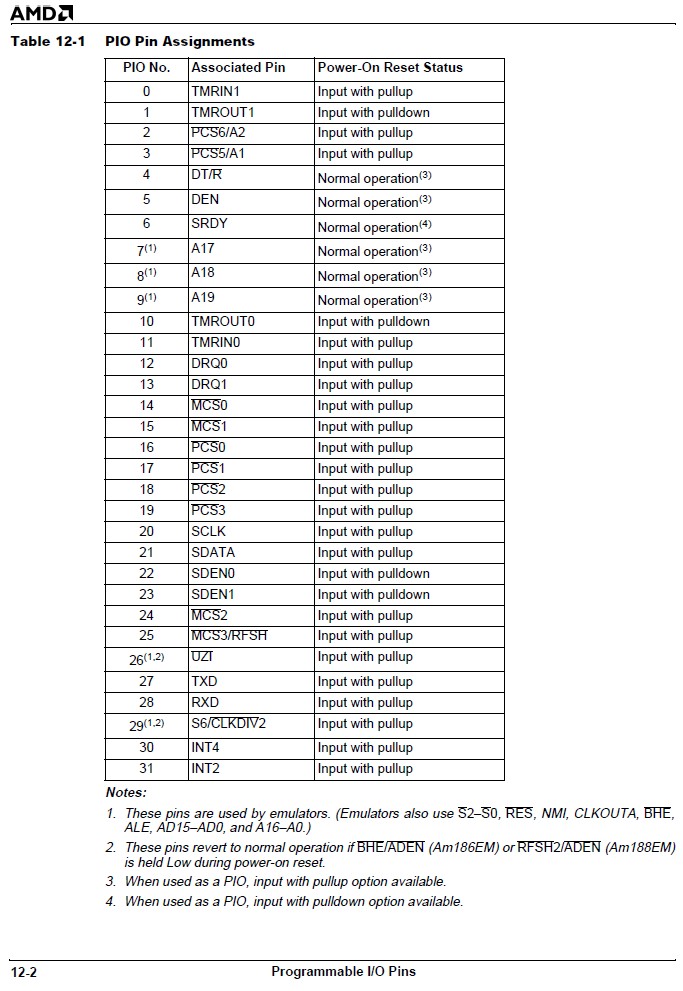
���`�l�P�W�W�b�o�t�{�[�h�����q�r�Q�R�Q�b�h�e�i�R�j
�`�l�P�W�W�̂q�w�c�Ƃs�w�c�͔ėp���o�́i�o�h�n�j�ƒ[�q�����p���Ă��܂��B
�`�l�P�W�W�̔ėp���o�͂͂o�h�n�O�`�o�h�n�R�P�̂R�Q�{����܂����A���̑S�Ă����炩�̕ʂ̋@�\�̓��o�͂ƒ[�q�����p���Ă��܂��B
�������̌��p�[�q�������\�ł��B
�m�o�T�n�`���������������@�l���������@�c�������������C�h�����D�@�`���P�W�U�d�l�@�������@�`���P�W�W�d�l�@�l�������������������������������@�t�������f���@�l����������
�s�w�c�͂o�h�n�Q�V�ƁA�q�w�c�͂o�h�n�Q�W�ƒ[�q�����p���Ă��܂��B
�\�E�̂����������@�����@�������������̏�Ԃ�����ƁA�ǂ���̒[�q�������������@���������@�������������ƂȂ��Ă��܂��B
���Z�b�g��̏�����Ԃł͂s�w�c���q�w�c���I�����ꂸ�A�ǂ�����o�h�n���͂ɐݒ肳��Ă��܂��B
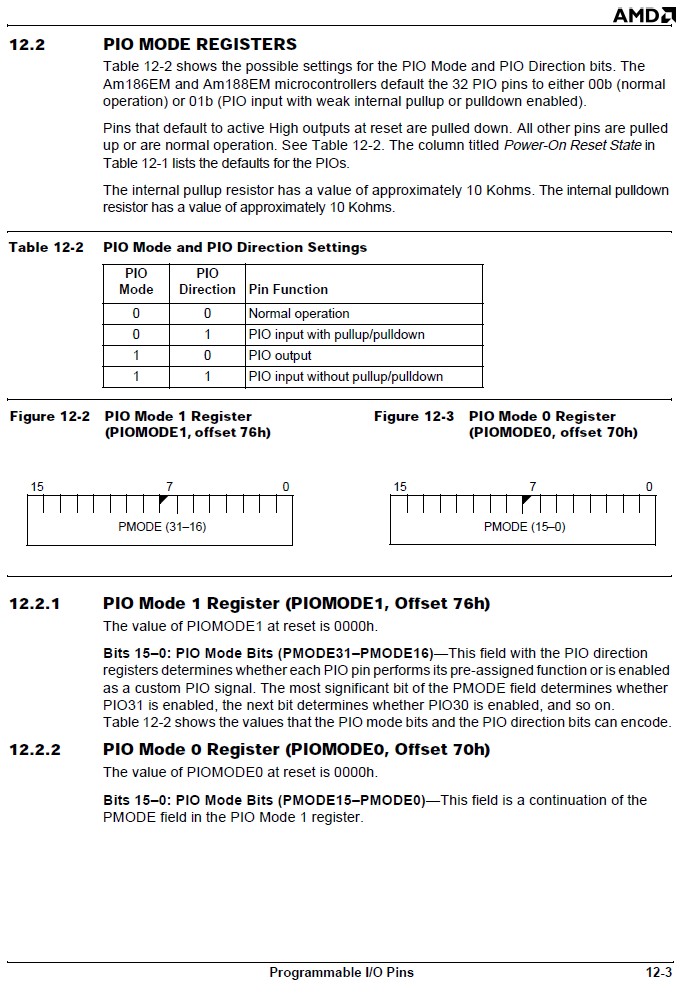
�o�h�n�Ƒ��̋@�\�����p����[�q���o�h�n�Ƃ��Ďg�����A���̋@�\�[�q�Ƃ��Ďg�������w�肷�邽�߂ɂQ�̃��W�X�^���p�ӂ���Ă��܂��B
�o�h�n�@�l�n�c�d�@�q�d�f�h�r�s�d�q�r�Ƃo�h�n�@�c�h�q�d�b�s�h�n�m�@�q�d�f�h�r�s�d�q�r�ł��B
�܂��͂o�h�n�@�l�n�c�d�@�q�d�f�h�r�s�d�q�r�ł��B
�o�h�n�@�l�n�c�d�@�P�@�q�d�f�h�r�s�d�q�A�o�h�n�@�l�n�c�d�@�O�@�q�d�f�h�r�s�d�q�̂��ꂼ��P�U�r�b�g�̂����̂P�r�b�g�ɂP�{�̂o�h�n�����蓖�Ă��܂��B
���͂o�h�n�@�l�n�c�d�@�q�d�f�h�r�s�d�q�r�̐����ł��B
�m�o�T�n�`���������������@�l���������@�c�������������C�h�����D�@�`���P�W�U�d�l�@�������@�`���P�W�W�d�l�@�l�������������������������������@�t�������f���@�l����������
�o�h�n�@�l�n�c�d�@�q�d�f�h�r�s�d�q�Ƃo�h�n�@�c�h�q�d�b�s�h�n�m�@�q�d�f�h�r�s�d�q�̓����ʒu�̃r�b�g�̑g�ݍ��킹�łS�̑I�����s�Ȃ��܂��B
�l�n�c�d���O�A�c�h�q�d�b�s�h�n�m���O�̂Ƃ��A�o�h�n�ȊO�̋@�\���I������܂��B
�l�n�c�d���O�A�c�h�q�d�b�s�h�n�m���P�̂Ƃ��A�����v���A�b�v��R�t���̂o�h�n���͂��I������܂��B
�l�n�c�d���P�A�c�h�q�d�b�s�h�n�m���O�̂Ƃ��o�h�n�o�͂��I������܂��B
�l�n�c�d���P�A�c�h�q�d�b�s�h�n�m���P�̂Ƃ������v���A�b�v��R�Ȃ��̂o�h�n���͂��I������܂��B
�o�h�n�@�l�n�c�d�@�O�@�q�d�f�h�r�s�d�q�i�A�h���X�e�e�V�O�j�̃r�b�g�O�ɂ͂o�h�n�O���A�r�b�g�P�ɂ͂o�h�n�P�����蓖�Ă��A���̂悤�ɂ��ăr�b�g�P�T�ɂ͂o�h�n�P�T�����蓖�Ă��܂��B
�o�h�n�@�l�n�c�d�@�P�@�q�d�f�h�r�s�d�q�i�A�h���X�e�e�V�U�j�j�̃r�b�g�O�ɂ͂o�h�n�P�U���A�r�b�g�P�ɂ͂o�h�n�P�V�����蓖�Ă��A���̂悤�ɂ��ăr�b�g�P�T�ɂ͂o�h�n�R�P�����蓖�Ă��܂��B
�o�h�n�@�l�n�c�d�@�O�@�q�d�f�h�r�s�d�q�A�o�h�n�@�l�n�c�d�@�P�@�q�d�f�h�r�s�d�q�̃��Z�b�g��̏����l�͂Ƃ��ɂO�O�O�O�ł��B
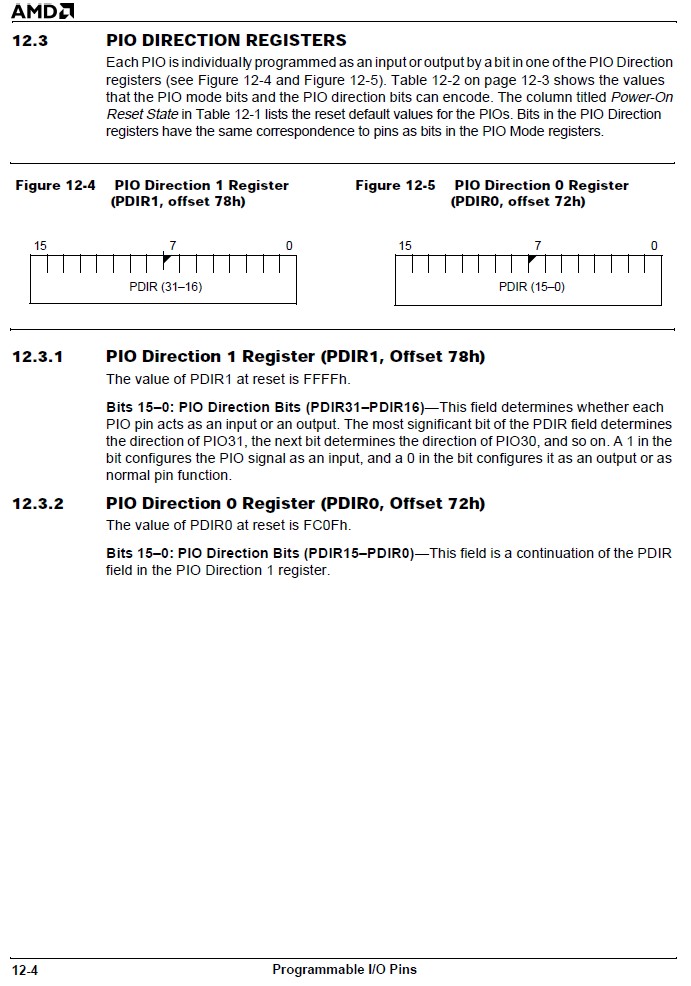
�o�h�n�@�c�h�q�d�b�s�h�n�m�@�q�d�f�h�r�s�d�q�r�̐����ł��B
�m�o�T�n�`���������������@�l���������@�c�������������C�h�����D�@�`���P�W�U�d�l�@�������@�`���P�W�W�d�l�@�l�������������������������������@�t�������f���@�l����������
�o�h�n�@�c�h�q�d�b�s�h�n�m�@�O�@�q�d�f�h�r�s�d�q�i�A�h���X�e�e�V�Q�j�̃r�b�g�O�ɂ͂o�h�n�O���A�r�b�g�P�ɂ͂o�h�n�P�����蓖�Ă��A���̂悤�ɂ��ăr�b�g�P�T�ɂ͂o�h�n�P�T�����蓖�Ă��܂��B
�o�h�n�@�c�h�q�d�b�s�h�n�m�@�P�@�q�d�f�h�r�s�d�q�i�A�h���X�e�e�V�W�j�j�̃r�b�g�O�ɂ͂o�h�n�P�U���A�r�b�g�P�ɂ͂o�h�n�P�V�����蓖�Ă��A���̂悤�ɂ��ăr�b�g�P�T�ɂ͂o�h�n�R�P�����蓖�Ă��܂��B
�o�h�n�@�c�h�q�d�b�s�h�n�m�@�O�@�q�d�f�h�r�s�d�q�̃��Z�b�g��̏����l�͂c�b�O�e�ł��B
�o�h�n�@�c�h�q�d�b�s�h�n�m�@�P�@�q�d�f�h�r�s�d�q�̃��Z�b�g��̏����l�͂e�e�e�e�ł��B
��̂Q�̐�������A�[�q�ɂs�w�c�Ƃq�w�c�����蓖�Ă�ɂ͂o�h�n�@�l�n�c�d�@�P�@�q�d�f�h�r�s�d�q�̃r�b�g�P�P�A�r�b�g�P�Q���O�ɁA�o�h�n�@�c�h�q�d�b�s�h�n�m�@�P�@�q�d�f�h�r�s�d�q�̃r�b�g�P�P�ƃr�b�g�P�Q���O�ɂ���悢���Ƃ��킩��܂��B
�o�h�n�@�l�n�c�d�@�P�@�q�d�f�h�r�s�d�q�̃��Z�b�g��̏����l�͂O�O�O�O�ł�����A���̂܂܂ŏ����ɍ����Ă��܂��B
�o�h�n�@�c�h�q�d�b�s�h�n�m�@�P�@�q�d�f�h�r�s�d�q�̃��Z�b�g��̏����l�͂e�e�e�e�ł�����A���̃r�b�g�P�P�ƃr�b�g�P�Q���O�ɂ���A�s�w�c�Ƃq�w�c���L���ɂȂ�͂��ł��B
����̖ړI�Ƃ͊O��܂����A�o�h�n�[�q���o�h�n���́A�܂��͂o�h�n�o�͂Ƃ��Ďg���ꍇ�ɂ��Ă����������Ă����܂��B
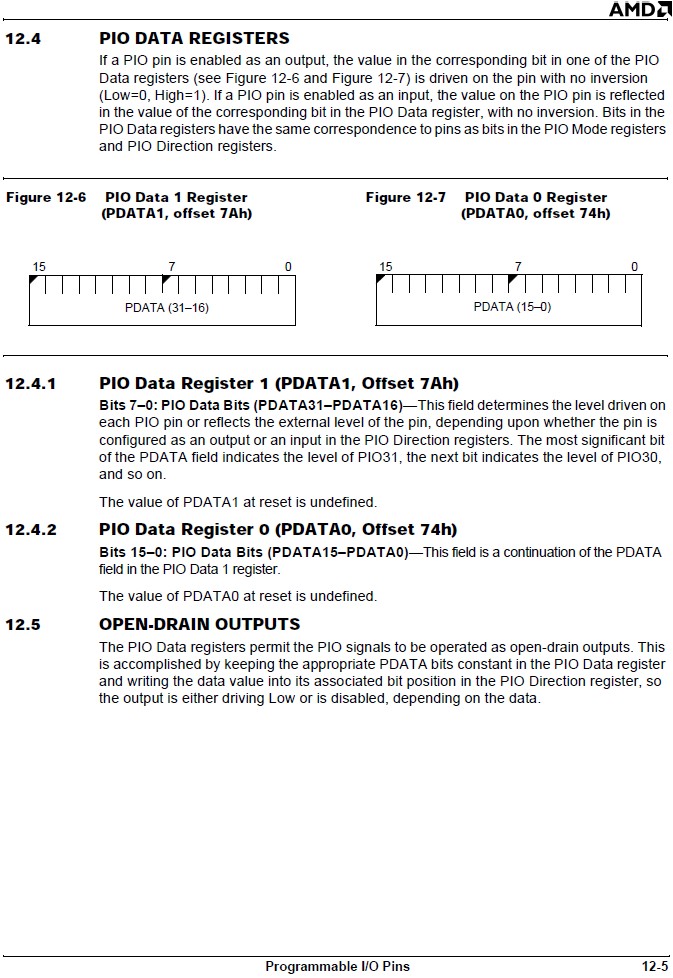
�������̐����ł��B
�m�o�T�n�`���������������@�l���������@�c�������������C�h�����D�@�`���P�W�U�d�l�@�������@�`���P�W�W�d�l�@�l�������������������������������@�t�������f���@�l����������
�o�h�n�@�l�n�c�d�@�q�d�f�h�r�s�d�q�r�A�o�h�n�@�c�h�q�d�b�s�h�n�m�@�q�d�f�h�r�s�d�q�r�Ɠ����v�̂ň������Ƃ��ł���f�[�^���W�X�^���p�ӂ���Ă��܂��B
�o�h�n�@�c�`�s�`�@�q�d�f�h�r�s�d�q�@�O�i�A�h���X�e�e�V�S�j�Ƃo�h�n�@�c�`�s�`�@�q�d�f�h�r�s�d�q�@�P�i�A�h���X�e�e�V�`�j�ł��B
�o�h�n�@�c�`�s�`�@�q�d�f�h�r�s�d�q�@�O�̃r�b�g�O�ɂ͂o�h�n�O���A�r�b�g�P�ɂ͂o�h�n�P�����蓖�Ă��A���̂悤�ɂ��ăr�b�g�P�T�ɂ͂o�h�n�P�T�����蓖�Ă��܂��B
�o�h�n�@�c�`�s�`�@�q�d�f�h�r�s�d�q�@�P�̃r�b�g�O�ɂ͂o�h�n�P�U���A�r�b�g�P�ɂ͂o�h�n�P�V�����蓖�Ă��A���̂悤�ɂ��ăr�b�g�P�T�ɂ͂o�h�n�R�P�����蓖�Ă��܂��B
���Z�b�g��̗����W�X�^�̒l�͕s��ł��B
�o�͂Ɏw�肳�ꂽ�[�q�ɂ͑Ή�����r�b�g�̒l���o�͂���܂��B
�o�͂̓I�[�v���h���C���Ȃ̂ŁA�l���O�̂Ƃ��͂k���o�͂���A�l���P�̂Ƃ��̓n�C�C���s�[�_���X�ɂȂ�܂��B
���͂Ɏw�肳�ꂽ�r�b�g�ɂ͑Ή�����[�q����̓��͒l���������܂�܂��B
�ȏ�̃f�[�^�����Ƃɂq�r�Q�R�Q�b����M�e�X�g�v���O�������쐬���܂����B