乵怴楢嵹乶俠俹俴俢擖栧両
乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣
偄偮偐巊偆偙偲偵側傞偩傠偆偲巚偭偰偼偄偨偺偱偡偑丅
壗傪崱崰偵側偭偰丄偲偄偆傛偆側傕偺偱偡偑丅
傛偆傗偔杮婥偱丄俠俹俴俢偲巐偮偵庢傝慻傒傑偡丅
乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣乣
乵戞俁俋夞乶
仠俶俢俉侽倅俽俵偺儌僯僞僾儘僌儔儉儕僗僩乮堦晹乯
崱夞偺夞楬偵懳墳偟偰曄峏偟偨晹暘偺俶俢俉侽倅俽俵偺儌僯僞僾儘僌儔儉儕僗僩偱偡丅
俶俢俉侽倅俽俵偼俶俢俉侽倅俁丏俆偐傜俈僙僌儊儞僩俴俤俢夞楬丄俆倃俆僉乕儃乕僪夞楬丄倀俽俛僀儞僞乕僼僃乕僗夞楬傪奜偟偰丄儅僀僐儞撈棫壔僙僢僩丄怴儅僀僐儞撈棫壔僙僢僩傪愙懕偟偰摦嶌偡傞偙偲偵摿壔偟偨儃乕僪偱偟偨丅
偟偐偟俶俢俉侽倅俽俵偵偱偒傞偩偗儘乕僐僗僩側俈僙僌儊儞僩俴俤俢夞楬偲俆倃俆僉乕儃乕僪夞楬傪奜晅偗偱偒傟偽丄俶俢俉侽倅俁丏俆偺儘乕僐僗僩斉偵偡傞偙偲傕偱偒傞偺偱偼側偄偐偲峫偊偨偙偲偱丄偙偺偲偙傠偺嶌嬈偲側傝傑偟偨丅
奜晅偗偡傞夞楬偑俶俢俉侽倅俁丏俆偲摨偠夞楬側傜偽丄俶俢俉侽倅俁丏俆偺儌僯僞僾儘僌儔儉傪偦偺傑傑巊偆偙偲偑偱偒傑偡丅
僉乕儃乕僪夞楬偼俿俿俴儘僕僢僋夞楬傪偦偺傑傑俤俹俵俈侾俀俉俽俴俠俉係偵抲偒姺偊偨偩偗側偺偱丄俶俢俉侽倅俁丏俆偺儌僯僞僾儘僌儔儉傪偦偺傑傑巊偊傑偡丅
偟偐偟俈僙僌儊儞僩俴俤俢夞楬偼俿俿俴夞楬傪俠俹俴俢偵抲偒姺偊偨偩偗偱偼側偔偰丄俢俵俙夞楬偩偭偨偲偙傠傪俹俬俠侾俇俥俆俈偵抲偒姺偊傑偟偨丅
傕偲傕偲偺俶俢俉侽倅俁丏俆儌僯僞僾儘僌儔儉偱偼俈僙僌儊儞僩俴俤俢昞帵偼俢俵俙傪棙梡偟偰偄傞偨傔偵丄俼俙俵偺僙僌儊儞僩昞帵梡傾僪儗僗偵僙僌儊儞僩僨乕僞傪彂偒崬傓偩偗偱嵪傒傑偟偨丅
俹俬俠侾俇俥俆俈傪棙梡偡傞崱夞偺夞楬偱偼丄乮俢俵俙偱偼側偄偨傔乯僙僌儊儞僩僨乕僞傪偨偩俼俙俵偵彂偒崬傓偩偗偱偼昞帵偝傟傑偣傫偐傜丄偦偙偺偲偙傠偺僾儘僌儔儉傪俹俬俠侾俇俥俆俈偵僙僌儊儞僩僨乕僞傪憲傞傛偆偵彂偒姺偊傞昁梫偑偁傝傑偡丅
壓偼偦偺晹暘偱偡丅
07CF CDC005 LEDDP0:CALL SEGCG
07D2 E5 LEDDP:PUSH H
07D3 D5 PUSH D
07D4 C5 PUSH B
07D5 21F8FF LXI H,DIG
07D8 0608 MVI B,08
07DA 0E88 MVI C,88
07DC CDE907 LEDDP2:CALL LEDDPS
07DF 23 INX H
07E0 0C INR C
07E1 05 DCR B
07E2 C2DC07 JNZ LEDDP2
07E5 C1 POP B
07E6 D1 POP D
07E7 E1 POP H
07E8 C9 RET
;
LEDDPS:;MOV A,C
;OUT 8E;adrs set
07E9 7E MOV A,M
;OUT 8F
07EA ED DB ED;OUT (C),A
07EB 79 DB 79;
07EC 1604 MVI D,04
07EE CDDF06 CALL D1_2;0.5msec wait
07F1 C9 RET
|
;;; 7seg LED disp for ND80ZUS/SM
;18/4/9 4/11 4/12 4/13
;from 7seg2j
;
; 16f57
; internal 12MHz
#include <p16f5x.inc>
__CONFIG _CP_OFF & _WDT_ON & _HS_OSC
;
cf=0
zf=2
f=1
w=0
;
ledcntr equ 0a
tcn1 equ 0b
indata equ 0c
tcn0 equ 0d
;
;digit0 to digit7 are 10 to 17
;
org 00
;
start
movlw 0;a0-a3 out
tris PORTA
bsf PORTA,3
movlw 1f;b7-b5 out b4-b0 in
tris PORTB
bsf PORTB,7;
movlw 0
tris PORTC;rc out
;
;start
movlw 10
movwf ledcntr
loop
clrwdt
;leddisp
movf ledcntr,w
movwf PORTA
movwf FSR
movf INDF,w
movwf PORTC
incf ledcntr,f
btfss ledcntr,3
goto t1ms
movlw 10
movwf ledcntr
;
;1ms wait
t1ms
movlw 2
movwf tcn0
t1ms1
clrf tcn1
t1ms2
clrwdt;1
btfss PORTB,4;data ready? 2
goto dataread;yes
t1ms3
decfsz tcn1,f;1
goto t1ms2;2---6/3*256=0.5ms
decfsz tcn0,f
goto t1ms1
goto loop
;datain
dataread
bsf PORTB,5;bit4-7 read
bcf PORTB,6
bcf PORTB,7;read
nop
movf PORTB,w
movwf indata
rlf indata,f
rlf indata,f
rlf indata,f
rlf indata,w
andlw 0f0
movwf indata
bcf PORTB,5;bit 0-3 read
nop
movf PORTB,w
andlw 0f
iorwf indata,f
bsf PORTB,6
nop
movf PORTB,w
bsf PORTB,7;read end
andlw 07;
iorlw 10
movwf FSR
movf indata,w
movwf INDF;---- 22/3=7us
goto t1ms3
;
end
;
|
仠僇儊儗僆儞儘僕傾僫偺攇宍
壓偼忋偱愢柧偟偨俹俬俠侾俇俥俆俈偺摦嶌乮幚嵺偵偼俶俢俉侽倅儌僯僞偲俤俹俵俈侾俀俉俽俴俠俉係偺摦嶌傕楢摦偟偰偄傑偡乯傪僇儊儗僆儞儘僕傾僫偱娤應偟偨攇宍偱偡丅
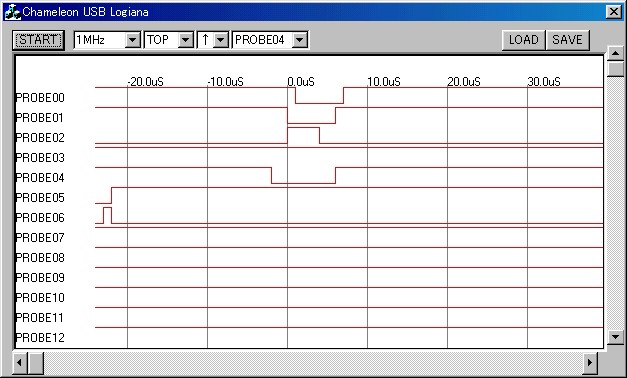
俹俼俷俛俤侽侽偼俼俛俈丄俹俼俷俛俤侽侾偼俼俛俇丄俹俼俷俛俤侽俀偼俼俛俆丄俹俼俷俛俤侽係偼俼俛係偱偡丅
俼俛係擖椡偑俴偵側傞偲俼俛俆亖俫丄俼俛俇亖俴偑弌椡偝傟傞偲偲傕偵俼俛俈亖俴偵側傝傑偡丅
偦偺屻俼俛俆亖侽丄俼俛俇亖侽偵側傝丄懕偄偰俼俛俆亖侽丄俼俛俇亖侾偵側偭偨偁偲丄撉傒庢傝傪廔椆偟偨報偲偟偰俼俛俈亖俫偵側傝傑偡丅
俼俛係傕俫偵側傝傑偡丅
偙傟偱侾寘暘偺僨乕僞偺憲庴偑姰椆偟傑偟偨丅
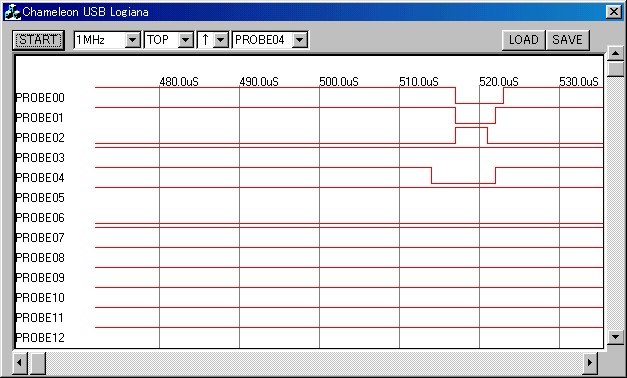
壓偼偦偺侽丏俆倣俽屻偺攇宍偱偡丅
師偺侾寘偺僨乕僞偑忋偲摨偠傛偆偵憲庴偝傟偰偄傑偡丅
俠俹俴俢擖栧両乵戞俁俋夞乶
俀侽侾俋丏係丏俀俉倳倫倢倧倎倓
慜傊
師傊
儂乕儉儁乕僕僩僢僾傊栠傞