仠僷僀僾偲僄儞僪億僀儞僩乮慜夞偺懕偒偱偡乯
僷僀僾偲僄儞僪億僀儞僩偲偺娭學偵偮偄偰丄壓偺傛偆側愢柧恾傪昤偄偰偄偨偺偱偡偑丄偦傟傪偡偭偐傝朰傟偰偟傑偭偰偄傑偟偨丅
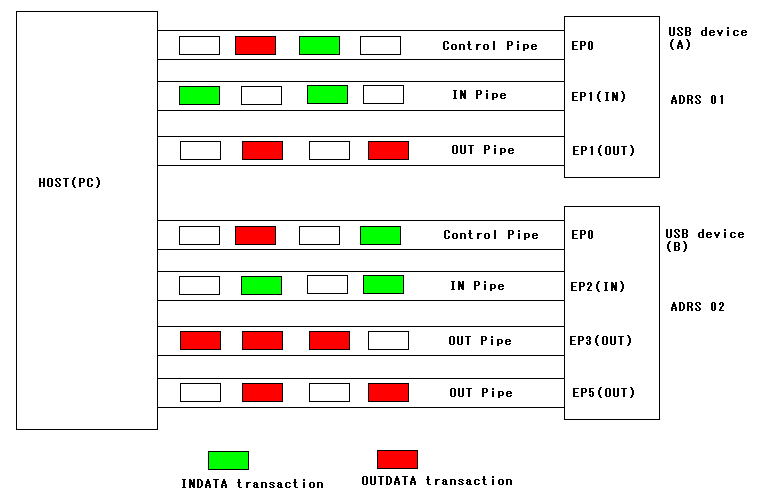
恾偱偼嵍偺儂僗僩乮僷僜僐儞乯偲塃偺倀俽俛憰抲乮俙乯偍傛傃乮俛乯偼偦傟偧傟倀俽俛働乕僽儖偱愙懕偝傟偰偄傑偡丅
暔棟揑側倀俽俛働乕僽儖偼偨偩偺侾杮偺働乕僽儖偱偡丅
偙偺倀俽俛働乕僽儖偺拞恎偼丄揹尮慄偱偁傞倁亄丄俧俶俢偲怣崋慄偺俢亄丄俢亅偺偨偐偩偐係杮偺慄偟偐偁傝傑偣傫丅
倀俽俛偼偦偺働乕僽儖傪巊偭偰僨乕僞傪懡廳偵揱憲偟傑偡丅
忋偺恾偼偦偺僨乕僞揱憲偺偟偔傒傪柾幃揑偵昞偟偨傕偺偱偡丅
儂僗僩乮僷僜僐儞乯偲倀俽俛憰抲偲偺娫傪愙懕偟偰偄傞乽懷乿偑乽僷僀僾乿偱偡丅
乽僷僀僾乿偼幚嵺偵懚嵼偡傞乽傕偺乿偱偼側偔偰丄僨乕僞揱憲偺偟偔傒傪峫偊傞偨傔偺丄乽壖憐揑乿側奣擮偱偡丅
僷僜僐儞偲倀俽俛憰抲偲偺娫偺僨乕僞偼丄倀俽俛働乕僽儖傪巊偭偰憲怣丄庴怣偝傟傞偺偱偡偑丄偦傟偼恾偺傛偆側乽僷僀僾乿偺奣擮偵廬偭偰揱憲偝傟傞偺偱偡丅
僷僜僐儞偐傜偼丄恾偺憰抲乮俙乯偼傾僪儗僗侾乮俙俢俼俽丂侾乯丄憰抲乮俛乯偼傾僪儗僗俀乮俙俢俼俽丂俀乯偲偟偰丄幆暿偝傟偰偄傑偡丅
偦偟偰僨乕僞偺憲庴怣偼丄僷僀僾傪捠偠偰愙懕偝傟偰偄傞丄傾僪儗僗侾丄傾僪儗僗俀偺奺僄儞僪億僀儞僩偵懳偟偰偍偙側傢傟傑偡丅
乽僷僀僾乿偼憰抲偺愝寁忋偺昁梫偵墳偠偰丄暋悢杮愝掕偡傞偙偲偑偱偒傑偡丅
恾偺憰抲乮俙乯偼俁杮丄乮俛乯偼係杮偺僷僀僾偱儂僗僩乮僷僜僐儞乯偲偮側偑偭偰偄傑偡丅
倀俽俛憰抲偼丄僄儞僪億僀儞僩偲偄偆壖憐揑側愙懕僐僱僋僞傪暋悢傕偭偰偄偰丄偦偙偵僷僀僾偑偮側偑傝傑偡丅
偦偺偆偪偺僄儞僪億僀儞僩侽乮俤俹侽乯偼丄僷僜僐儞偲憰抲偲偺娫偱丄婎杮揑側忣曬偺傗傝庢傝乮僐儞僩儘乕儖揱憲乯傪偡傞偨傔偺傕偺偱丄倀俽俛憰抲偼昁偢傕偭偰偄側偗傟偽側傜側偄傕偺偱偡丅
偙偙偵愙懕偝傟傞僷僀僾偼僐儞僩儘乕儖僷僀僾偲偄偄傑偡丅
僐儞僩儘乕儖揱憲偲偄偆偺偼丄偙偺僷僀僾傪巊偭偰峴偆僨乕僞揱憲偺偙偲偱偡丅
俤俹侽偵愙懕偝傟傞乽僐儞僩儘乕儖僷僀僾乿偺傎偐偵丄儂僗僩偑憰抲偐傜僨乕僞傪擖椡偡傞乽俬俶僷僀僾乿偲儂僗僩偐傜憰抲偵僨乕僞偑弌椡偝傟傞乽俷倀俿僷僀僾乿偑偁傝傑偡丅
乽僐儞僩儘乕儖僷僀僾乿偩偗偼丄僨乕僞偺憲怣偲庴怣傪摨偠僷僀僾傪巊偭偰峴偆乽憃曽岦乿僷僀僾側偺偱偡偑丄乽俬俶僷僀僾乿偼僨乕僞偑僷僜僐儞偵乽擖椡乿偝傟傞曽岦偵偟偐棳傟側偄乮僷僜僐儞仼憰抲乯扨曽岦僷僀僾偱丄乽俷倀俿僷僀僾乿偼僨乕僞偑僷僜僐儞偐傜乽弌椡乿偝傟傞曽岦偵偟偐棳傟側偄乮僷僜僐儞仺憰抲乯扨曽岦僷僀僾偱偡丅
僐儞僩儘乕儖僷僀僾偼昁偢僄儞僪億僀儞僩侽乮俤俹侽乯偵愙懕偝傟傑偡丅
偦偺傎偐偺俬俶丄俷倀俿僷僀僾偵偮偄偰偼丄俤俹侽埲奜偺偳偺噦偺僄儞僪億僀儞僩傪巊偆偐傪丄憰抲懁偺巇條偱擟堄偵掕傔傞偙偲偑偱偒傑偡丅
俤俹侽偼憃曽岦偺僄儞僪億僀儞僩偱偡偑丄偦偺傎偐偺僄儞僪億僀儞僩偼扨曽岦偱偡偐傜丄俬俶僷僀僾偵偼俬俶僄儞僪億僀儞僩傪丄俷倀俿僷僀僾偵偼俷倀俿僄儞僪億僀儞僩傪愙懕偡傞偙偲偵側傝傑偡丅
俬俶丄俷倀俿僄儞僪億僀儞僩偼偦傟偧傟噦侾乣噦侾俆偺斖埻偺斣崋偱幆暿偝傟傑偡丅
恾偺憰抲乮俙乯偼俤俹侽偺傎偐偵俤俹侾乮俬俶乯偲俤俹侾乮俷倀俿乯偺俀偮偺僄儞僪億僀儞僩乮擖椡侾丄弌椡侾乯傪傕偭偰偄傑偡丅
傑偨憰抲乮俛乯偼俤俹侽偺傎偐偵俤俹俀乮俬俶乯丄俤俹俁乮俷倀俿乯丄俤俹俆乮俷倀俿乯偺俁偮偺僄儞僪億僀儞僩乮擖椡侾丄弌椡俀乯傪傕偭偰偄傑偡丅
側偍俬俶丄俷倀俿偼偮偹偵儂僗僩乮僷僜僐儞乯偐傜尒偨偲偒偺丄擖椡丄弌椡偺偙偲傪偄偄傑偡丅
俠俹倀傪偮偔傠偆両戞係俀俇夞乮俀侽侾侽丏侾丏俁侾倳倫倢倧倎倓乯傪嵞曇廤
俹俬俠偱倀俽俛傪両乵戞俁係夞乶
俀侽侾侾丏俈丏侾侽倳倫倢倧倎倓
慜傊
師傊
栚師傊栠傞
儂乕儉儁乕僕僩僢僾傊栠傞