(儂儞僩偼俈係俫俠丄俠俵俷俽側傫偩偗偳乧乯
乵戞係侾侾夞乶
柧偗傑偟偰偍傔偱偲偆偛偞偄傑偡丅
杮擭傕傛傠偟偔偍婅偄偄偨偟傑偡丅
杮擔偼俀擔偱偡丅偨傑偵偼儕僙僢僩偟偰擼嵶朎傪儕僼儗僢僔儏偝偣傞偨傔偵傕丄偍惓寧偔傜偄偼偺傫傃傝偟側偗傟偽丄偲偄偆偙偲偱丄堦攖傗傝側偑傜僸僢僠僐僢僋偺柤嶌偱傕尒偰夁偛偦偆偐偲偐丄偄傗偄傗偦傟傕偄偄偗傟偳丄傗偭傁傝儅儕儕儞儌儞儘乕傕幪偰偑偨偄側偁偲偐丄偆偆丄僕儑儞僂僃僀儞傕偄偄偟丄僗僠乕僽儅僢僋傿乕儞傕偄偄偟丄傓傓丄偦傫側偙偲傪尵偭偰偄傞偲丄偁偁丄僆乕僪儕乕僿僢僾僶乕儞偲偐僀儞僌儕僢僪僶乕僌儅儞傑偱尒偨偔側偭偰偟傑偭偰丄偩傔偩丄偳傟偐傜愭偵尒傛偆偐柪偭偰偟傑偆乧丅
偱丅傑偁丄偲傝偁偊偢丄僷僜僐儞傪俷俶偵偟偰丄慜夞偺偲偙傠傪撉傒捈偟偰偍傝傑偟偨傜乮側傫偱僆乕僪儕乕僿僢僾僶乕儞偲僀儞僌儕僢僪僶乕僌儅儞偺妺摗偐傜偄偒側傝偙偙偵旘傫偱偟傑偆偺偐偼丄杮恖偵傕傑偭偨偔偺撲側偺偱偁傝傑偡偑乯丄俹俬俠侾俇俥俉俉偺僷儖僗弌椡僾儘僌儔儉偵岆傝偑偁傞偙偲偵婥偑偮偄偰偟傑偄傑偟偨丅
愝栤偼丄乽嵟抁偺暆偺僷儖僗傪弌椡偟側偝偄乿偲偄偆傕偺偱偟偨丅
偙偆偄偆愝栤偼丄僒儞僾儖僾儘僌儔儉偲偟偰偼旔偗傞傋偒側偺偱偁傝傑偟偰丄偙傫側愝栤傪偟偰偟傑偆傕偺偱偡偐傜丄僆乕僪儕乕僿僢僾僶乕儞傕僀儞僌儕僢僪僶乕僌儅儞傕尒傜傟側偔側偭偰偟傑偄傑偡丅
乽嵟抁偺乿側偳偲偼偟側偄偱丄乽揔摉側乿偔傜偄偵偟偰偍偗偽丄偄傑偛傠偼堦攖傗傝側偑傜丄塮夋娪徿傪怱峴偔傑偱妝偟傫偱偍傟傑偟偨偺偵乧丅
偦偆側偺偱偡丅
慜夞偺僒儞僾儖僾儘僌儔儉偼嵟抁偱偼偁傝傑偣傫偱偟偨丅
仠俹俬俠侾俇俥俉俉僥僗僩僾儘僌儔儉乮偦偺俀乯
偱丅傕偭偲抁偔偱偒傞偠傖側偄偐丄偲偄偆偙偲偱僷儖僗偺弌椡晹傪彂偒捈偟偨丄傾僙儞僽儔偺僜乕僗僾儘僌儔儉偱偡丅
乵拲婰乶偙偺僾儘僌儔儉偵偼儈僗偑偁傝傑偡乮乵戞係侾俇夞乶嶲徠乯丅
慜夞偺僾儘僌儔儉偺偳偙傪偳偆偟偨偺偐偲尵偄傑偡偲丄倢倧倧倫偺拞偺丄倣倧倴倖丂俹俷俼俿俛丆倵傪庢偭偰偟傑偭偨偺偱偡丅偙傟偼忕挿偱偟偨丅
幚峴寢壥偱偡丅
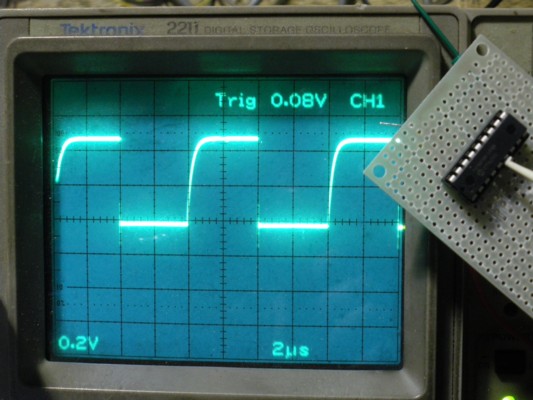
慜夞偼僕儍僲栚婎斅偺棤偑尒偊偰偍傝傑偟偨偺偱丄崱夞偼昞偑尒偊傞傛偆偵偟傑偟偨丅
掞峈偲僐儞僨儞僒偼棤偵庢傝晅偗傑偟偨偐傜丄昞懁偵偼俹俬俠埲奜偼側偵傕尒偊傑偣傫丅
柦椷傪侾偮嶍傝傑偟偨偺偱丄僷儖僗暆偑偦偺暘乮侾兪倱乯抁偔側偭偰丄係兪倱偵側傝傑偟偨丅
杮擔偼偙傟偱偍偟傑偄丅
偝偁丄僿僢僾僶乕儞傪尒傞偧偍丄偩偭偨偺偱偡偗傟偳丅
偩傔偱偼側偄偐丅
傕偭偲抁偔偱偒傞偠傖側偄偺丅側偵峫偊偰傞傫偱偟傚偆偐偹偊丅
傗偭傁傝丄擭偺曢傟偐傜偺傾儖僐乕儖偑敳偗偰側偄傛偆偱偁傝傑偟偰乧丅
仠俹俬俠侾俇俥俉俉僥僗僩僾儘僌儔儉乮偦偺俁乯
偲偄偆偙偲偱僷儖僗偺弌椡晹傪傑偨傑偨彂偒捈偟偰偟傑偭偨丄傾僙儞僽儔偺僜乕僗僾儘僌儔儉偱偡丅
乵拲婰乶偙偺僾儘僌儔儉偵偼儈僗偑偁傝傑偡乮乵戞係侾俇夞乶嶲徠乯丅
偝偒傎偳偺倲倕倱倲俆丏倎倱倣偱丄
倶倧倰倢倵丂侽侾乮傾僙儞僽儔昞婰偱偼丄偙偙偼倶倧倰倢倵丂侾偱傕峔偄傑偣傫乯
倣倧倴倵倖丂俹俷俼俿俛
偲偟偰偄偨偲偙傠傪丄倢倧倧倫偵擖傞慜偵丄
倣倧倴倢倵丂侾乮偙偙偼傾僙儞僽儔昞婰偱偼丄倣倧倴倢倵丂侽侾偱傕峔偄傑偣傫乯
偲偟偰偍偄偰丄倢倧倧倫偺拞偱偼
xorwf PORTB
偩偗偵偟偰偄傑偡丅
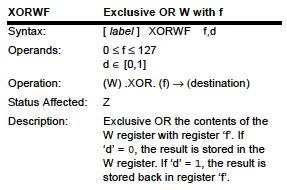
俹俬俠偺柦椷偼偪傚偄偲僋僙偑偁傝傑偟偰丄儚乕僉儞僌儗僕僗僞乫倵乫偲儐乕僓乕掕媊儗僕僗僞乮偙傟偼堦斒宍偱偼乫倖乫偱帵偝傟傑偡乯偲偺娫偺墘嶼偼丄俉侽俉侽傗倅俉侽側偳偲偼堎側偭偰偄偰丄墘嶼寢壥傪乫倵乫偵抲偔偩偗偱偼側偔偰丄乫倖乫偵抲偔偙偲傕偱偒傞偺偱偡乮偦偺応崌偵偼乫倵乫偺抣偼曄傢傝傑偣傫乯丅
傾僙儞僽儔偺惓偟偄昞婰偱偼丄寢壥傪乫倵乫偵抲偔応崌偼丄
xorwf PORTB,0
偲彂偒傑偡丅
xorwf偼乫倵乫偲乫倖乫偲偺倃俷俼傪寁嶼偣傛丄偲偄偆柦椷偱偡丅
俹俬俠偺傾僙儞僽儔僯乕儌僯僢僋偼堦斒偵埆偔尵傢傟偰偄傞傎偳傢偐傝偵偔偄傕偺偱偼偁傝傑偣傫丅偦偺傑傫傑偱偡丅
偙傟偵斾傋傞偲俠偺昞婰偺傎偆偑傕偭偲傕偭偲僞僠偑埆偆偛偞偄傑偡丅
偁丅偱丄嵟屻偵晅壛偟偨僷儔儊乕僞偑倓倕倱倲倝値倎倱倝倧値乮乫倓乫乯偱偡丅寢壥偺奿擺曽岦偱偡丅
偙偙傪侽偵偡傞偲寢壥偼乫倵乫偵擖傟傜傟傑偡丅
寢壥傪儐乕僓乕掕媊儗僕僗僞乮崱夞偺椺偱偼俹俷俼俿俛乯偵擖傟傞偵偼丄
xorwf PORTB,1
偲彂偒傑偡丅
嶲峫傑偱偵丄俹俬俠偺俢倎倲倎丂俽倛倕倕倲偺俬値倱倲倰倳們倲倝倧値丂俢倕倱們倰倝倫倲倝倧値偵婰嵹偝傟偰偄傞倃俷俼倂俥偺愢柧偱偡丅
乵弌揟乶俵倝們倰倧們倛倝倫幮俹俬俠侾俇俥俉俉俢倎倲倎丂俽倛倕倕倲
偙偙偵偼婰嵹偝傟偰偄側偄偺偱偡偑丄暿偺俹俬俠偺俢倎倲倎丂俽倛倕倕倲偱偼丄乫倓乫亖侾偑倓倕倖倎倳倢倲偱偁傞偲彂偄偰偁傝傑偡丅
倓倕倖倎倳倢倲偼嬤擭偼傗傝偺乽嵚柋晄棜峴乿偱偼偁傝傑偣傫丅
巜掕徣棯帪偵慖戰偝傟傞昗弨愝掕偺偙偲偱偡丅
偱丄偝偒傎偳偺僾儘僌儔儉偵栠傝傑偡偲丄
倶倧倰倵倖丂俹俷俼俿俛
偼丄嵟屻偺僷儔儊乕僞傪徣棯偟偰偄傑偡偐傜丄俹俬俠傾僙儞僽儔偵傛偭偰丄偙偙偼僨僼僅儖僩偺乫侾乫偑巜掕偝傟傑偡丅
偲偄偆偙偲偼丄墘嶼寢壥偑乫倵乫偵偱偼側偔偰丄俹俷俼俿俛偵擖傟傜傟丄乫倵乫偺抣偼偦偺傑傑乮乫侽侾乫偺傑傑乯巆傞偲偄偆偙偲偵側傝傑偡丅
偁丅倣倧倴倢倵偼倣倧倴倕丂倢倝倲倕倰倎倢丂倲倧丂倵偲偄偆柦椷偱乮倢倝倲倕倰倎倢偼掕悢偺偙偲偱偡乯丄掕悢傪乫倵乫偵奿擺偟傑偡丅
偙偺傾僙儞僽儔僯乕儌僯僢僋傕乽偦偺傑傫傑乿偱偡丅
偙傟偑幚峴寢壥偱偡丅
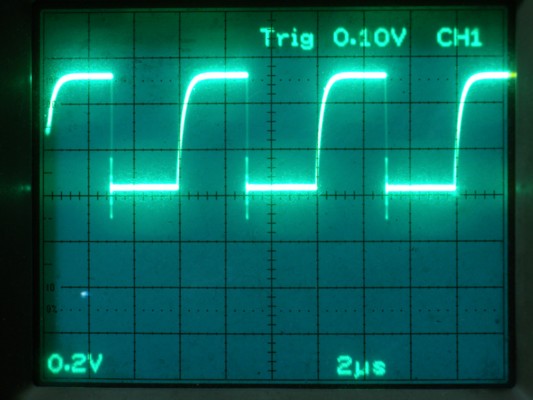
倶倧倰倵倖丂俹俷俼俿俛偲倗倧倲倧丂倢倧倧倫偺傒傪孞傝曉偟幚峴偟傑偡偐傜丄偦偺柦椷幚峴帪娫偼丄倶倧倰倵倖偺侾僒僀僋儖僞僀儉乮侾兪倱乯亄倗倧倲倧偺俀僒僀僋儖僞僀儉乮俀兪倱乯亖俁兪倱偵側傝傑偡丅
偙傟偑丄俹俬俠傪們倫倳僋儘僢僋係俵俫倸偱憱傜偣偨偲偒偺丄嵟抁暆偺弌椡僷儖僗偱偡丅
幚偼嵟弶偵僒儞僾儖僾儘僌儔儉傪彂偄偨偲偒偼丄偙偺僾儘僌儔儉偩偭偨偺偱偡偗傟偳丄俹俷俼俿俛偺懠偺弌椡價僢僩偑僆乕僾儞僪儗僀儞傜偟偄偙偲偵婥偑偮偐側偔偰丄偦偪傜偺偍偐偟側弌椡偺怳傞晳偄偵婥傪庢傜傟偰丄偄傠偄傠僾儘僌儔儉傪捈偟偰帋偟偰偄傞偆偪偵丄嵟弶偺僾儘僌儔儉偺偙偲傪偡偭偐傝朰傟偰偟傑偭偰丄慜夞偺僾儘僌儔儉偵側偭偰偟傑偭偨偺偱偟偨丅
偦傟偼偲傕偐偔偲偟傑偟偰丄俠傪巊偭偰偄偰偼丄偙偆偄偆寍摉偼偲偰傕偱偒側偄丄偲偄偄傑偡偐乽巚偄傕傛傜側偄偙偲乿偱偼側偄偐丄偲偄偆偙偲偵偮偄偰偺丄傂偲偮偺尒杮偵偼側偭偨偺偱偼側偄偐丄偲巚偆偺偱偡偑偄偐偑偱偟傚偆偐丠
偙傟偑丄乽僜僼僩僂僃傾偱僴乕僪僂僃傾傪惂屼偡傞乿偲偄偆偙偲側偺偩丄偲巹偼巚偆偺偱偁傝傑偡丅
俀侽侾侽丏侾丏俀倳倫倢倧倎倓
慜傊
師傊
儂乕儉儁乕僕僩僢僾傊栠傞