(儂儞僩偼俈係俫俠丄俠俵俷俽側傫偩偗偳乧乯
乵戞係侾侽夞乶
仠俹俬俠侾俉俥係俆俆侽偺儊儌儕傾僋僙僗偵偮偄偰愢柧偡傞偮傕傝偱偟偨偑乧
杮擔偼戝夾擔偱偡丅
杮摉偵偁偭偲偄偆娫偺侾擭偱偟偨丅
俀侽侽俋擭傕杮擔尷傝丅
偱丄儊儌儕傾僋僙僗偵偮偄偰丄杮擭偺掲傔偔偔傝偲偟偰丄偽偨偽偨偭偲曅晅偗偰偟傑偭偰丄偱偼傛偄偍擭傪偍寎偊偔偩偝偄傑偣丄偲偄偆挷巕偱傗偭偮偗偰偟傑偍偆偲巚偭偨偺偱偡偗傟偳乧丅
慜夞丄慜乆夞傪撉傒捈偟偰傒傑偡偲丄偄傗偁丄偦偆偄偆傢偗偵偼偄偐傫側偁丄偲偄偆姶偠側偺偱偡偹偊丅
偙偙偱丄偽偨偽偨偭偲曅晅偗偰偟傑偭偨傜丄傑傞偱傛偔偁傞椶偺丄撉傫偩偗偳寢嬊壗傕恎偵偮偐側偄偲偄偆乽媄弍擖栧彂乿偲摨偠偠傖側偄偺丅
慜夞偼丄乽偙傫側傕偺撉傓昁梫偼偁傝傑偣傫乿偺傂偲偙偲偱曅晅偗偰偟傑偄傑偟偨偗傟偳丄偦偆偄偆偙偲偱偼丄偄偐傫偱偟傚偆丅
傗偭傁傝傑偠傔側撉幰彅巵偵偍偐傟傑偟偰偼丄乽撉傓側乿偲尵傢傟偰傕傗偭傁傝撉傒偨偄丄撉傫偱傒傛偆丄偲巚傢傟傞偺偑恖忣偺忢丅
偱丄撉傫偱傒傛偆偲偡傞偗傟偳丄偨偄偑偄偼乽偆偆丅傢偐傜傫乿偲偄偆偙偲偵側傝傑偡丅
偦偆偡傞偲丄梸媮晄枮偵側偭偰偟傑偄傑偡偺偱丄偦偆偄偆惛恄忬懺偱怴擭傪寎偊偰偄偨偩偔偺偼傛傠偟偔偁傝傑偣傫丅
偔偦傒偦偵偗側偟偰偄傑偟偨偗傟偳丄傛偔傛偔棊偪拝偄偰俹俬俠侾俉俥係俆俆侽偺俢倎倲倎丂俽倛倕倕倲傪撉傒捈偟偰傒傑偡偲丄偦傟傎偳偗側偝側偔偰偼側傜側偄傎偳傂偳偄僔僗僥儉偱偼側偄偱偼側偄偐丄偄傗丄媡偵側偐側偐傛偔峫偊偰偁傞側偁丄偲巚偄巒傔偨偲偙傠偱傕偁傝傑偡丅
偦偆偟傑偡偲丄偙偙偼傑偨傑偨摴憪偮偄偱偵丄傂偲偮揙掙揑偵僇僀儃乕偟偰偟傑偍偆偱偼側偄偐丄偲偄偆偙偲偵側偭偰偟傑偆偺偱偡傛偹偊乮傕偆錗偺拞偲偄偆傛傝傕丄晉巑偺庽奀傒偨偄側傕偺偱丄壥偨偟偰惗偒偰偄傞偆偪偵敳偗弌偣傑偡偐偳偆偐乯丅
偙偆側傞偲丄傕偆戝夾擔傕偍惓寧傕側偄丄懎悽傪棧傟偰丄媄弍嶰枂偱傑偄傝傑偟傚偆丅
側偺偱偡偗傟偳丄偦偆偼尵偭偨傕偺偺丄偦偙偼彫恖偺斶偟偝丄晜悽傪棧扙偟偰偟傑偆偙偲偼偲偰傕偐側偄傑傊傫乮偦傫側偙偲傪偡傞偲傎傫偲偆偵巰傫偱偟傑偄傑偡傞乯丅
偱丄偁傜偨傔偰崢傪悩偊偰偐偐傝偨偄偲巚偄捈偟偨儊儌儕傾僋僙僗偵偮偄偰偼丄師夞埲崀乮偮傑傝擭偑柧偗偰偐傜偲偄偆偙偲偱偁傝傑偡乯偵抳偟傑偟偰丄崱夞偼杮擭偺掲傔偔偔傝偲偄偨偟傑偟偰乮偳偙偑掲傔偔偔傝偠傖偁乯丄暿偺僥乕儅偱偍榖傪偄偨偟傑偡丅
仠俠丂倧倰丂傾僙儞僽儔丂丠丂倝値丂俹俬俠
岥偼嵭偄偺栧偲偐怽偟傑偟偰丄尵傢側偔偰傕偄偄偙偲傪晄梡堄偵敪尵偟偨傝偡傞傕偺偱偡偐傜丄偁偲偱僼僅儘乕傪梋媀側偔偝傟傞偙偲偵側偭偰偟傑偄傑偡丅
乽俹俬俠偱俠側偳傪巊偆偍曽偺婥偑抦傟側偄乿側偳偲偄偆夁寖側敪尵傪懕偗偰傑偄傝傑偡偲丄乽偄傑偳偒偙傫側帪戙嶖岆偵偼偮偒偁偭偰偍傟傫乿偲巚傢傟偰丄偮偄偵偼婱廳側撉幰條傪幐偭偰偟傑偆偙偲偵傕側傝偐偹傑偣傫丅
傫偱傕丄帠幚偼帠幚偲偟偰丄揱偊側偗傟偽偄偗傑偣偸丅
偦偆側傞偲丄梫偼僼僅儘乕偱偡丅
尵偄偭傁側偟偼堦斣偄偗傑偣偸丅
仠偦傕偦傕俠偲偼堦懱側偵傕偺偧丠
偦偙傫偲偙傠傪傢偐偭偰偄傜偭偟傖傜側偄偱俠傪偍巊偄偺曽偑悽娫偵偼梋傝偵懡偄傛偆偵巚傢傟傑偡丅
偁偁丅俠偱傕俠亄亄偱傕倁倝倱倳倎倢俠亄亄偱傕摨偠偱偡丅
柺搢側偺偱俠偺崤懏堦懓榊搣傪慡晹傂偭偔傞傔偰丄俠偲徧偟傑偡丅
偙偲偵俠偱俹俬俠僾儘僌儔儉傪夝愢偟偰偄傜偭偟傖傞曽乆側偳偼丄杮摉偵傢偐偭偰偄傜偭偟傖傞偺偐側偁丄偲媈栤偵巚偭偰偟傑偄傑偡丅
偁偁丅俵倝們倰倧們倛倝倫幮偺柺乆傕偍傫側偠偐偁丅偄傗丄偙傝傖庛偭偨側偀丅堷偭崬傒偑偮偐傫偱偼側偄偐丅
偱傕偱傕偙傟偩偗暘岤偄俢倎倲倎丂俽倛倕倕倲傪嶌惉偟偰偄傜偭偟傖傞偲偙傠傪尒傑偡偲丄杮摉偼俵倝們倰倧們倛倝倫幮傕偦偙傫偲偙傠偼廫暘偵彸抦偺忋丄偲悇應偟偰偍傝傑偡丅崱偺偲偙傠偼丅
偱傕懡彮婋尟側挍岓偼尒庴偗傜傟傑偡丅
俵倝們倰倧們倛倝倫幮嫙媼偺俹俬俠偺僒儞僾儖僾儘僌儔儉偑傒偛偲偵俠偽偭偐傝偵側偭偰偍傝傑偡傞丅
偙偆側傞偭偰偊偲丄徻嵶偵傢偨偭偰夝愢偟偰偍傝傑偟偨俹俬俠偺俢倎倲倎丂俽倛倕倕倲偑慡偰徚偊嫀偭偰丄俠偱偺婰弎偵摑堦偝傟偰偟傑偆擔傕偦偆墦偔偱偼側偄偺偐傕丄偲婋湝偺擮傪書偐偞傞傪偊傑偣傫丅
壗偑娫堘偭偰偄傞偺偐丄壗偑婋尟側偺偐丅
偦傟偵偮偄偰丄愢柧傪偄偨偟傑偡丅
仠俠偼崅媺尵岅偱偡
偦傕偦傕俠偲偼堦懱側偵傕偺偧丅
俠偲偼崅媺尵岅偱偁傝傑偡傞丅
崅媺尵岅偲偼丄捠忢掅師偺尵岅偱偁傞婡夿岅乮傾僙儞僽儔傪娷傓乯偵懳斾偟偰梡偄傜傟傞尵梩偱偁傝傑偡丅
傫側偙偲偼抦偭偰傞傛偋丅
偁丅傑偁傑偁丅棊偪拝偄偰丅
傫丠抦偭偰偄傜偭偟傖傞丠
杮摉偵丠
偱偼婡夿岅偵懳偟偰崅媺尵岅偲偄偆応崌偦傕偦傕偳偙偑偳偆堘偆偺偐丅
側偤偵婡夿岅偱偼側偔偰丄崅媺尵岅側偺偐丠
偦偙偺偲偙傠偐傜偺棟夝偑娞梫偱偁傝傑偡傞丅
婡夿岅偑柺搢嬌傑傝側偄偙偲偼廃抦偺偙偲偱偁傝傑偡丅
偦偺偨傔偵丄傾僙儞僽儔偑奐敪偝傟傑偟偨丅
偦傟偱偄偄偠傖側偄偺丠
偦傟偱傛偔偼側偐偭偨偺偱偡丅
愄偺僐儞僺儏乕僞偼傒偛偲偵僴乕僪偵埶懚偟偰偄傑偟偨乮偼偢偱偡乯丅
仠婡夿岅偼丠
偨偲偊偽丄俬俛俵偺僐儞僺儏乕僞偱奐敪偟偨婡夿岅乮傾僙儞僽儔乯偺僾儘僌儔儉偼丄懠幮偺僐儞僺儏乕僞偱偼幚峴偱偒傑偣傫丅
偦傟偼摉偨傝慜偺偙偲偱偡丅
偦傟偩偗偱偼側偔偰丄摨偠俬俛俵偺僐儞僺儏乕僞偺娫偱傕丄媄弍偺恑曕偵偟偨偑偭偰丄怴偟偄夞楬傪嵦梡偡傞偲丄埲慜偺夞楬偱捠偭偰偄偨婡夿岅偺僾儘僌儔儉偑幚峴偱偒側偔側偭偰偟傑偄傑偡丅
屳姺惈傪堐帩偟傛偆偲偡傞偲丄偄偮傑偰傕媽幃偺夞楬傪傂偒偢傞偙偲偵側偭偰偟傑偄傑偡丅
偪側傒偵丄堦悽傪晽阹偟偨俶俤俠偺俹俠俋俉侽侾僔儕乕僘偼丄弶婜偺俉侽俉俇俠俹倀偺俹俠俋俉侽侾偲偺婡夿岅儗儀儖偱偺姰慡屳姺傪堐帩偡傞偨傔偵丄偦偺屻偺俀俉俇丄俁俉俇俠俹倀傪搵嵹偟偨僔儕乕僘偵偍偄偰傕丄儃乕僪撪偵
乵俀侽侾侾丏俆丏係拲婰乶摉婰帠傪偍撉傒偄偨偩偄偨曽偐傜儊乕儖傪偄偨偩偒傑偟偨丅
俀俉俇丄俁俉俇傪搵嵹偟偨俋俉侽侾倁僔儕乕僘偵幚憰偟偰偄偨偺偼俉侽俉俇偱偼側偔偰倁俁侽偱偡丄偲偺偛巜揈傪偄偨偩偒傑偟偨丅
倁俁侽偼俶俤俠偑奐敪偟偨俉侽俉俇忋埵屳姺偺侾俇倐倝倲俠俵俷俽丒俠俹倀偱偡丅
偛巜揈偄偨偩偒桳擄偆偛偞偄傑偟偨丅
偙偙偵嬣傫偱掶惓偝偣偰偄偨偩偒傑偡丅乮拲婰偙偙傑偱乯
偝偡偑丄俶俤俠偱偁傝傑偡丅偦傟偱偙偦丄偁偭傁傟擔偺娵儊乕僇乕偱偁傝傑偡丅
崱偺俶俤俠偼偳偆偩偐抦傝傑偣傫偗傟偳丅
傎傫偲丄俵倝仜倱倧倖倲偺價仜僀僣孨偵偼丄僇僱栕偗偽偭偐傝偵愱擮偟側偄偱丄俶俤俠偺僣儊偺傾僇偱傕愾偠偰堸傔丄偲尵偭偰傗傝偨偄偱偡偅丅
偁偁丅傑偨扙慄偟偰偟傑偄傑偟偨丅
杮戣偵栠傝傑偡丅
偦傟偼偟偐偟丄戝曄側偙偲偱偁傝傑偡丅
偄傑傗僜僼僩僂僃傾傪敳偒偵偟偰偼僐儞僺儏乕僞偼慡偔惉傝棫偪傑偣傫丅僜僼僩僂僃傾偺廳梫惈偼擔乆憹戝偟偰偒偰偄傑偡丅
偦偺僜僼僩僂僃傾偑弶婜偺僐儞僺儏乕僞偺傛偆偵丄屄乆偺儅僔儞偺愝寁偵怺偔埶懚偟偰偄傞偲偄偆偙偲偱偼丄墳梡媄弍偺奐敪偵抳柦揑側塭嬁傪梌偊偰偟傑偄傑偡丅
仠崅媺尵岅偲偼丠
傕偆偍傢偐傝偄偨偩偗偨偲巚偄傑偡丅
崅媺尵岅偼偦偆偄偆僴乕僪僂僃傾偲偺偟偑傜傒傪抐偮偨傔偵峫偊弌偝傟偨尵岅偩偭偨偺偱偡乮偲巚偄傑偡傛乯丅
偟偨偑偭偰桪傟偰愻楙偝傟偨崅媺尵岅偼僴乕僪僂僃傾傪慖偽側偄丅
僜乕僗僾儘僌儔儉儗儀儖偱偼丄偳偆偄偆僴乕僪僂僃傾偺忋偱傕幚峴偱偒傞屳姺惈傪堐帩偟偰偄傞偙偲偑丄偦偺懚嵼偺婎杮揑側忦審偱偁傝傑偡乮偙偙傫偲偙丄旕忢偵廳梫偱偡偐傜丄偟偭偐傝儅乕僋偟偰偍偄偰偔偩偝偄傑偣乯丅
偙偺儖乕儖偵傛偭偰丄偁傜備傞僜僼僩僂僃傾偑僴乕僪僂僃傾偵偐偐傢傞偙偲側偔丄姰慡側屳姺惈傪妉摼偟偨偙偲偵側傝傑偡乮偙傟偼偄偆側傜偽僶乕僠儍儖側僔僗僥儉偱偁傝傑偡乯丅
偦偙偱師偵昁梫晄壜寚偵側偭偰偒傑偡偺偑丄偦偺僜乕僗僾儘僌儔儉傪屄乆偺儅僔儞偺婡夿岅偵惓偟偔東栿偟偰偔傟傞僐儞僷僀儔偱偡丅
偦偆偡傞偲丄偣偭偐偔嬯楯偟偰嶌傝忋偘偨崅媺尵岅側偺偩偗傟偳傕丄崱搙偼怴偟偄儅僔儞傪奐敪偡傞偨傃偵丄僐儞僷僀儔乮偮傑傝婡夿岅傊偺東栿僾儘僌儔儉乯傕屄乆偵梡堄偟側偗傟偽側傜側偄丄偲偄偆偙偲偵側傝傑偡丅
偦傟傪彆偗傞偨傔偵丄俷俽乮僆儁儗乕僔儑儞僔僗僥儉乯側傞傕偺傕峫偊弌偝傟偨偺偱偁傝傑偡偗傟偳丄婎杮揑偵丄僐儞僷僀儔偑婡夿岅偵東栿偟側偗傟偽側傜側偄丄偲偄偆栶栚偑俷俽偵傛偭偰曄傢偭偨傢偗偱偼偁傝傑偣傫丅
偟偐偟俷俽偵偮偄偰偼梋択偺梋択偵側偭偰偟傑偄傑偡偐傜丄偙偙偱偼怗傟傑偣傫丅
偲傕偐偔丄崅媺尵岅偲偄偆傕偺偼丄梫偡傞偵丄僴乕僪僂僃傾偺偟偑傜傒偐傜姰慡偵奐曻偝傟傞偨傔偺傕偺偱偁傞丄偲偄偆偙偲偵偮偄偰偼丄偳偪傜條偵傕堎懚偼側偐傠偆偐偲巚偄傑偡丅
偱傕丄幚嵺偺偲偙傠丄俠傪偍巊偄偺奆條曽偼丄偦偙傫偲偙傠傪偮偄偆偭偐傝偲幐擮側偝偭偰偄傞偺偱偼丄偲巚偄傑偡丅
仠偦傟偱偼俹俬俠偺僾儘僌儔儉傪俠偱彂偔偲偄偆偙偲偼乧
傛傠偟偄偱偟傚偆偐丅
俠偼僴乕僪僂僃傾偵埶懚偟側偄崅媺尵岅偱偁傞丅
傛傠偟偄偱偡偹丅
偱偼丄偙偙偱栤戣偱偡丅
俹俬俠偺僾儘僌儔儉傪僴乕僪僂僃傾偵埶懚偟側偄偱丄彂偔偙偲偑壜擻偱偟傚偆偐丠
偄傗丄偨偲偊壜擻偩偲偟偰傕丄偦傫側僾儘僌儔儉偵側傫偺堄枴偑偁傞偺偱偟傚偆偐丠
偩偭偰丄僴乕僪偵埶懚偟側偄偙偲偑寶慜偺尵岅傪巊偭偰丄偳偆傗偭偰俹俬俠偺壗斣僺儞偺丄億乕僩壗偲偐偺價僢僩偐傜俫怣崋傪弌椡偣傛丄偲偐丄壗斣僺儞偐傜怣崋傪擖椡偣傛丄偲偐偲偄偆僾儘僌儔儉傪彂偔偺偱偟傚偆丠
巹偺抦傞尷傝偱偼丄俠乮俠亄亄偱傕傛傠偟偄乯偺倱倲倓倝倧偱傕側傫偱傕傛傠偟偄偑乮僗僞儞僟乕僪俬俷偲尵偭偰偄傞偵傕偐偐傢傜偢乯丄儅僔儞偵捈寢偡傞丄俬俶丄俷倀俿柦椷偼懚嵼偟側偄偼偢側偺偱偡傛偹偊丅
偦偟偨傜俹俬俠偺僾儘僌儔儉側偳丄彂偗傞偼偢偼側偄偠傖偁傝傑偣傫偐丅
偳偩偄丄傗傠偆偲偟偰偄傞偙偲偑柍棟側偺偱偡傛丅
傕偆姰慡偵暘楐偟偰偍傝傑偡傞丅
俵倝們倰倧們倛倝倫幮傕偦偙傫偲偙傠偼傢偐偭偰偄偰丄偩偐傜俹俬俠偺偨傔偩偗偺乮偼傗偄偼側偟偑偦偙傫偲偙偩偗偼傔偪傖傔偪傖屳姺惈柍帇偺儉儕儉儕偺乯俠僐儞僷僀儔傪梡堄偟偰偄傑偡丅
傫偠傖偁丄偳偙偑俠側偺偐偲偄偄傑偡偲丄俠偺婡擻偵俹俷俼俿俛偩偲偐丄俿俼俬俽俛偩偲偐偺婡擻柤偑埖偊傞傛偆偵側偭偰丄俠僐儞僷僀儔偱偡偆丄偲偄偆偙偲偺傛偆側偺偱偡傛偹偊丅
偦偆偡傞偲丄偦傟傪巊偊偽俹俬俠偵偮偄偰抦傜側偔偰傕僾儘僌儔儉傪彂偔偙偲偑偱偒傞傛偆偵側傞偺偐丄偲偄偆偲丄偦偆偄偆傢偗偵偼偄偐傫偱偟傚偆傛丅
偦傕偦傕俹俷俼俿俛偲偄偆傕偺偑壗暔偱丄偦偺價僢僩偑俹俬俠側傫偨傜偺壗斣僺儞偵偮側偑偭偰偄傞偺偐丄偲偄偆傛偆側婎杮揑側忣曬偼抦傜側偄偱嵪傑偡傢偗偵偼偄偐側偄偱偟傚偆丅
偄偐側偄偗傟偳傕丄傂傚偭偲偡傞偲丄偦偙傫偲偙傠傕丄僿僢僟乕僼傽僀儖偵偟偰僀儞僋儖乕僪偟偰偟傑偭偰丄偨偲偊偽倧倳倲倫倐侾乮値乯傪俠俙俴俴偡傞偲俹俷俼俿俛偺値價僢僩偐傜侾傪弌椡偟傑偡傛丄倧倳倲倫倐侽乮値乯傪俠俙俴俴偡傞偲侽傪弌椡偟傑偡傛丄偲偄偆傆偆偵偟偰偟傑偄傑偡偲丄偙傟偼傕偆偐側傝僶乕僠儍儖偵嬤偔側偭偰偒傑偡丅
傫偱傕丄偦偆偄偆偙偲偱傛偄偺偐丠杮摉偵偦傟偱偄偄偺偐丠
偲丄偳偆偟偰傕峫偊偰偟傑偆偺偱偡傛偹丅
偊丅奆條偼偳偆偍巚偄偵側傜傟傑偡偱偟傚偆偐丅
仠俹俬俠偵偼傾僙儞僽儔偑偁傞偠傖偁傝傑偣傫偐
偦傫側柺搢側偙偲傪偟側偔偰傕丄俹俬俠傾僙儞僽儔偱
倐倱倖丂俹俷俼俿俛丆値
偲彂偗偽嵪傓偠傖偁傝傑偣傫偐丅
僆乕僶乕僿僢僪側偳婥偵偡傞偙偲偼慡偔偁傝傑偣傫丅
幚僋儘僢僋偱幚峴偟偰偔傟傑偡丅
偁偁丅偦偆偱偡丅
崅媺尵岅偺傕偮抳柦揑側寚揰偲偟偰丄僆乕僶乕僿僢僪偑偁傝傑偡丅
僐儞僷僀儔偼偦傟傪側傫偲偐夞旔偟傛偆偲搘椡偟傑偡偗傟偳丄強慒婡夿岅乮亖傾僙儞僽儔乯偺揋偱偼偁傝傑偣傫丅
僐儞僺儏乕僞偺悽奅偱偼僆乕僶乕僿僢僪偲偼丄偁傞張棟傪偡傞偺偵偐偐偭偰偟傑偆張棟帪娫乮偲傝傢偗偦傟偑偐偐傝夁偓傞偲偒偵梡偄傞乯偺偙偲傪偄偄傑偡丅
偱傕丄偦傟偭偰俹俬俠偺僾儘僌儔儉偱偼抳柦揑側偺偱偼偁傝傑偣傫偐丠
傑丅偦偺偙偲偵偮偄偰偼丄偁偲偱傑偨愢柧偡傞偙偲偵偄偨偟傑偟傚偆丅
偨偲偊偽俹俬俠偺俠侾俉僐儞僷僀儔傪巊偆偙偲偵偟偰丄捠忢偺俠僐儞僷僀儔偺傒偺抦幆偟偐帩偭偰偄側偄曽偑丄俠侾俉僐儞僷僀儔傪巊偆偲偟偨傜丄嵟弶偵傑偢丄俠俷俶俥俬俧偺愝掕偩偲偐丄俹俷俼俿偺愝掕偩偲偐傪偳偆偡傟偽偄偄偺丠偲偄偆偲偙傠偱偮偐偊偰偟傑偆偼偢偱偡丅
偩偭偰丄偦傟偼堦斒偺俠偺娭梌偟側偄乮偡傋偒偱偼側偄乯帠暱側偺偱偡偐傜丄抦傜側偄偺偑摉偨傝慜偱偡丅
偦偆偡傞偲丄俠侾俉僐儞僷僀儔偺愢柧彂傪撉傫偱丄娭悢傪扵偡偙偲偵側傝傑偡丅
傂傚偭偲偡傞偲丄儊僀儞偺柦椷晹暘偵偼彂偄偰側偔偰丄僀儞僋儖乕僪偡傞僿僢僟乕僼傽僀儖偵偁偭偨傝偟偰乧丅
側傫偱丄偦偆偄偆晄栄偲偟偐偄偄傛偆偺側偄搘椡傪偣偵傖偁側傜傫偺偐丠
偨偲偊偽偝偒傎偳偺
倐倱倖丂俹俷俼俿俛丆値
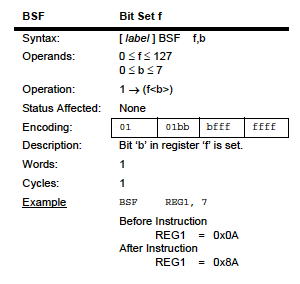
偺倐倱倖偲偄偆柦椷偼丄俹俬俠偺俢倎倲倎丂俽倛倕倕倲偺俬値倱倲倰倳們倲倝倧値丂俽倕倲傪尒傟偽偪傖傫偲彂偄偰偁傝傑偡丅
乵弌揟乶俵倝們倰倧們倛倝倫幮丂俹俬俠侾俇俥俉俉俢倎倲倎丂俽倛倕倕倲
娙寜偵偟偰柧夣丄傕偆偦偺傑傫傑偠傖偁傝傑偣傫偐丅
側傫偱偙偆偄偆偡偖偵巊偊傞娙扨側傕偺傪巊偍偆偲偟側偄偱丄傢偞傢偞夞傝摴傪偟偰丄俠側傫偧傪巊偍偆偲偡傞偺偱偟傚偆丠
偟偐傕愝掕僼傽僀儖偩偲偐丄僿僢僟乕僼傽僀儖偩偲偐丄慜弨旛偑戝曄側傕偺偱偡偐傜丄寢嬊偺偲偙傠怺偔摜傒崬傕偆偲偼偟側偄偱丄偳側偨偐偑偍嶌傝偵側偭偨僒儞僾儖僾儘僌儔儉傪偄偨偩偄偰丄偦偺側偐偱娭悢偺僷儔儊乕僞偩偗傪偪傚偙偪傚偙偭偲捈偟偰丄偦傟偱丄
偱偒偨丄偱偒偨丄愭惗丄俹俬俠偺僾儘僌儔儉偑偱偒傑偟偨丅
偭偰丄偦傟偭偰堘偆偱偟傚丅
壗偵傕傢偐偭偰側偄偺偲堘偄傑偡丠
偣偭偐偔俹俬俠偲偄偆丄庤寉偵僴乕僪偲僜僼僩偺椉曽偑懱尡偱偒傞慺嵽偑偁傝側偑傜丄側傫偱傢偞傢偞俠側偳傪巊偭偰僶乕僠儍儖偵偟偰偟傑偆偺偐丄巹偵偼偲傫偲崌揰偑偄偒傑偣傫偱偡丅
仠傾僙儞僽儔偼擄偟偄偐丠
偩偭偰丄傾僙儞僽儔偼擄偟偄偐傜乧丅
偦傫側偙偲偼側偄偱偡丅
偦傟偼堦斒偵棳晍偝傟偨僨儅偵偡偓傑偣傫偱偡丅
傾僙儞僽儔偔傜偄娙扨側傕偺偼偁傝傑偣傫偱偡傛偍丅
偁丅傑丅偦傟偼偪傚偄偲僆乕僶乕僩乕僋偱偟偨丅
崱屻偺乽愩壭乿傪旔偗傞偨傔偵傕丄堦墳丄乽俹俬俠偵尷偭偰偼乿偮偆扐偟彂偒傪偮偗偰偍偔偙偲偵偄偨偟傑偡丅
偳偺偔傜偄丄俹俬俠傾僙儞僽儔偑娙扨側偺偐丄椺偱帵偟偰傒傞偙偲偵偄偨偟傑偡丅
椺戣偱偡丅
俹俷俼俿俛偺價僢僩侽偐傜嵟抁偺暆偺僷儖僗傪弌椡偟側偝偄丅
偙傟偼傛偔偁傞僔僠儏僄乕僔儑儞偱偡丅
彂偒崬傒僷儖僗偱傕惂屼僷儖僗偱傕側傫偱傕偄偄偱偡偗傟偳傕丄偁傞廃攇悢偺僷儖僗傪弌椡偟偨偄丄偲偄偆偺偼弌椡惂屼偺婎杮拞偺婎杮偱偡丅
俵倄俠俹倀俉侽偺俿俲俉侽墳梡僾儘僌儔儉偱傕丄弌椡僷儖僗偺廃攇悢傪曄偊傞偙偲偱丄壒奒傪弌椡偡傞偲偄偆偺偑偁傝傑偟偨偱偡偹偊丅
偝偰丄俠側傜偳偆傗傝傑偡偱偟傚偆丠
巹偼抦傝傑偣傫丅
傫側傕偺峫偊傞婥偵傕側傝傑偣傫偐傜丅
仠俹俬俠偺僒儞僾儖僾儘僌儔儉偱偡
俹俬俠偼壗偱傕傛偄偺偱偡偑丄俹俬俠侾俇俥俉俉傪巊偭偰傒傞偙偲偵偟傑偟傚偆丅
俹俬俠侾俇俥俉俉偼撪晹僋儘僢僋敪怳儌乕僪偲偄偆曋棙側婡擻偑偁偭偰丄奜偵僋儕僗僞儖傪庢傝偮偗側偔偰傕丄們倧値倖倝倗偺愝掕偱俵倎倶俉俵俫倸偺僋儘僢僋傪帺慜偱嫙媼偱偒傑偡偐傜丄夞楬偑幚偵娙扨偵側傝傑偡丅
偙傫側姶偠偱偡丅
偝偡偑偵偙傟偼偪傚偄偲棎朶偱偡偗傟偳丄偲傝偁偊偢摦偒傑偡丅
偹偊丅僴乕僪偼偙傫側偵娙扨偱偡偺偵丄偙偺僴乕僪傪摦偐偡偺偵丄俠僐儞僷僀儔傪巊偆傫偱偡偐偁丅
傾僙儞僽儔傪巊偄傑偟傚偆傛丅
偱丅傾僙儞僽儔偺僜乕僗僾儘僌儔儉偱偡丅
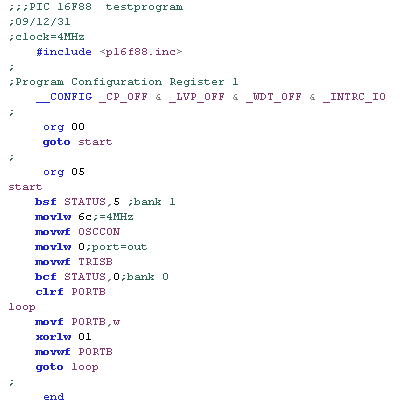
乵拲婰乶偙偺僾儘僌儔儉偵偼儈僗偑偁傝傑偡乮乵戞係侾俇夞乶嶲徠乯丅
俠俷俶俥俬俧偺偲偙傠偼偍傑偠側偄傒偨偄側傕偺偱偡丅
偱傕徻嵶傪抦傝偨偗傟偽丄俹俬俠侾俇俥俉俉俢倎倲倎丂俽倛倕倕倲偵偼偪傖傫偲彂偄偰偁傝傑偡丅
乵弌揟乶俵倝們倰倧們倛倝倫幮俹俬俠侾俇俥俉俉俢倎倲倎丂俽倛倕倕倲
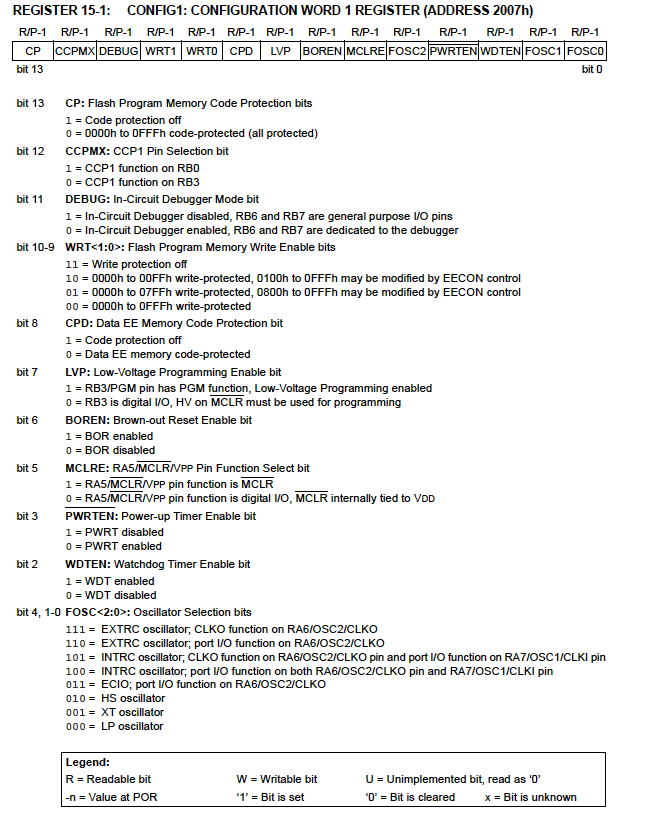
奺愝掕抣偺堄枴丄徻嵶偵偮偄偰傕俢倎倲倎丂俽倛倕倕倲偵愢柧偑偁傝傑偡乮姫枛偺嶕堷偱婰嵹儁乕僕偑傢偐傝傑偡乯丅
傾僙儞僽儔偺俠倧値倖倝倗偺昞婰偵偼偪傚偄偲僋僙偑偁傝傑偡偑丄偨偲偊偽丵俠俹丵俷俥俥偲偐丵俴倁俹丵俷俥俥偲偄偆傛偆側昞婰偼丄俵俹俴俙俛傪僟僂儞儘乕僪偡傞偲偮偄偰偔傞丄倝値倖僼傽僀儖乮忋偺僾儘僌儔儉椺偱偼倫侾俇倖俉俉丏倝値倖乯傪撉傔偽尒摉偑偮偒傑偡丅
偙偆偄偆偙偲偼傾僙儞僽儔傪巊偆偐傜尒偊偰偔傞偙偲偱丄俠僐儞僷僀儔偱偼傛偔傢偐傜側偄晹暘偱偟傚偆丅
偝偰丄傾僙儞僽儔偺僜乕僗儕僗僩偺丄倐倱倖丂俽俿俙俿倀俽丆俆偐傜倐們倖丂俽俿俙俿倀俽丆俆傑偱偺偲偙傠偼丄億乕僩偺岦偒乮俬俶偐俷倀俿偐乯偲偐俠俹倀僋儘僢僋偺愝掕側偳傪偟偰偄傞偲偙傠偱丄俹俬俠傪埖偆偐傜偵偼丄俠偱偁傠偆偲側偐傠偆偲丄偙偙偼旔偗偰偼捠傟側偄偲偙傠偱偡偟丄偦偺撪梕偵偮偄偰傕丄摉慠抦偭偰偄側偔偰偼側傝傑偣傫丅
偱丄偙偙傕丄俠傪捠偠偰棟夝偡傞偺偑娙扨偐丄偦傟偲傕俢倎倲倎丂俽倛倕倕倲偐傜捈愙棟夝偡傞偺偑娙扨偐丄偲偄偆偙偲偱偡偗傟偳丄偄偐偑偱偟傚偆偐丠
偨偲偊偽摿庩儗僕僗僞俽俿俙俿倀俽偺價僢僩俆傪侾偵偡傟偽丄儊儌儕僶儞僋侾偑慖戰偝傟丄偦傟傪侽偵偡傟偽僶儞僋侽偑慖戰偝傟傞丄偲偄偆偙偲傕俢倎倲倎丂俽倛倕倕倲傪撉傔偽傢偐傞偺偱偡丅
傑偨俷俽俠俠俷俶偵俇俠傪梌偊傟偽丄撪晹敪怳僋儘僢僋偑係俵俫倸偵側傞偙偲傕丄俢倎倲倎丂俽倛倕倕倲傪撉傔偽傢偐傝傑偡偟丄俿俼俬俽俛偺乫侽乫傪彂偒崬傫偩價僢僩偵懳墳偡傞俹俷俼俿俛偺價僢僩偺岦偒偑弌椡偵側傞偲偄偆偙偲傕丄偦傟偐傜丄俷俽俠俠俷俶傗俿俼俬俽俛偼僶儞僋侾偵偁偭偰丄俹俷俼俿俛偼僶儞僋侽偵偁傞偲偄偆偙偲傕丄慡晹俢倎倲倎丂俽倛倕倕倲傪撉傔偽傢偐傞偺偱偡丅
偲偙傠偱俠僐儞僷僀儔偩偲丄偄偭偨偄偳偙傪撉傫偩傜偦傟傜傪棟夝偡傞偙偲偑偱偒傞偺偱偟傚偆偐丠
傛偔傢偐傜傫偐傜丄寢嬊僒儞僾儖僾儘僌儔儉傪偦偺傑傑僐儞僷僀儖偡傞偙偲偵側偭偰偟傑偆偺偱偼偁傝傑偣傫偐丠
偦傟偠傖偁壗傕傢偐傜傫偺偲摨偠偱偼偁傝傑偣傫偐丠
巹偼丄偦偆偄偆偙偲偑尵偄偨偄偺偱偡傛丅
偝偰丄僾儘僌儔儉偺幚峴晹暘偱偡丅
倢倧倧倫偐傜倗倧倲倧丂倢倧倧倫傑偱傪孞傝曉偟偰偄傞偩偗偱偡丅
偨偭偨偙傟偩偗偱偡丅
俹俬俠偺僾儘僌儔儉傪偛懚抦偱偼側偄曽偱傕丄俉侽俉侽傗倅俉侽偺婡夿岅乮傾僙儞僽儔乯偑偍傢偐傝偵側傞曽偱偟偨傜丄側傫偲側偔撉傔傞傛偆側婥偑偟傑偣傫偐丠
偦偺捠傝丅撉傔傞偺偱偡傛丅
俹俬俠偺傾僙儞僽儔偼偪傚偄偲僋僙偑偁偭偰昡敾偼梋傝傛傠偟偔側偄傛偆偱偡偗傟偳丄偦傟偱傕俠傛傝偼憡摉儅僔偩偲巚偄傑偡傛丄巹偼丅
倣倧倴倖丂俹俷俼俿俛丆倵偼俹俷俼俿俛傪儚乕僉儞僌儗僕僗僞倵偵倣倧倴倕偣傛偲偄偆柦椷偱偡偟丄倶倧倰倢倵丂侽侾偼丄偦偺倵偺抣偲侽侾偺倶倧倰傪寁嶼偣傛偲偄偆柦椷偱偡偟丄倣倧倴倵倖丂俹俷俼俿俛偼倵儗僕僗僞偺抣傪俹俷俿俛偵倣倧倴倕偣傛丄偲偄偆柦椷偱偡丅
傎傜偹丅偦偺傑傫傑偠傖偁傝傑偣傫偐丅
幚偵娙扨偱偟傚偆丅
偦傟偩偗偺僾儘僌儔儉偱摦偄偰偟傑偆偺偱偡傛丅
偙偺捠傝偱偡丅
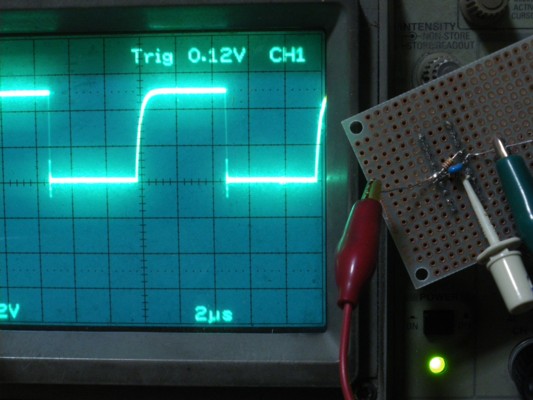
忋偺僾儘僌儔儉傪幚峴拞偺幨恀偱偡丅
僕儍僲栚婎斅偼棤懁偟偐尒偊傑偣傫偑丄俹俬俠侾俇俥俉俉埲奜偵偼掞峈偲僐儞僨儞僒偟偐偁傝傑偣傫丅
儈僲儉僔僋儕僢僾偱揹尮傪嫙媼偟偰偄傑偡丅
儈僯僋儕僢僾偼僆僔儘偺僾儘乕僽偵偮側偄偱偄傑偡丅
仠傾僙儞僽儔側傜僷儖僗暆偑寁嶼偱偒傞偺偱偡
偙傟偼傕偆丄俠偱偼媡棫偪偟偨偭偰幚尰偱偒側偄婡擻偱偡丅
偩傟偐偑嶌偭偨僞僀儅乕儖乕僠儞側傫偰傕偺傪偝偑偟偰偒偰僀儞僋儖乕僪偡傟偽傾僶僂僩偱偟偨傜偱偒側偄偙偲偼側偄偱偟傚偆偗傟偳丄偙傟偩偗惓妋偵偟偐傕崅偄廃攇悢傪摼傞偙偲偼丄俠偵偼偱偒側偄寍摉偱偟傚偆丅
崱夞偺僾儘僌儔儉椺偱偼俹俬俠偺僋儘僢僋偼偨偐偩偐係俵俫倸偱偡丅
俹俬俠偺柦椷僒僀僋儖偼俠俹倀僋儘僢僋偺侾乛係偱偡丅
偮傑傝俠俹倀僋儘僢僋偑係俵俫倸偺応崌丄侾柦椷偼侾兪倱扨埵偱幚峴偝傟傑偡丅
偨偄偰偄偺柦椷偼侾兪倱偱幚峴偝傟傑偡偑丄俀兪倱偐偐傞柦椷傕偁傝傑偡丅
偦傟偱偄偰丄僆僔儘偺攇宍偐傜傢偐傝傑偡傛偆偵丄俫亖俆兪俽丄俴亖俆兪俽偱偡偐傜侾侽侽俲俫倸偺弌椡偑摼傜傟偰偄傞偺偱偡丅
俫弌椡傕俴弌椡傕丄傢偢偐俆柦椷僒僀僋儖偱幚峴偝傟偰偄傞偺偱偡丅
偟偐傕俠偲堘偭偰丄傾僙儞僽儔側傜丄僾儘僌儔儉傪彂偄偨偲偒偐傜丄偦偺僷儖僗暆偼栺懇偝傟偰偄傞偺偱偡丅
倣倧倴倖丄倶倧倰倢倵丄倣倧倴倵倖偼侾柦椷僒僀僋儖偱幚峴偝傟丄倗倧倲倧偼俀柦椷僒僀僋儖偱幚峴偝傟傑偡丅偱偡偐傜侾夞偺弌椡偁偨傝俆兪倱側偺偱偡丅
偄偐偑偱偟偨偱偟傚偆偐丠
俹俬俠側傜傾僙儞僽儔丄偲偄偆偙偲偵擺摼偄偨偩偗傑偟偨偱偟傚偆偐丅
仠俵俹俴俙俛偺僶僌丠
偲偙傠偱丄傾僙儞僽儔傪偍偡偡傔偟偰偍偒側偑傜丄壗側偺偱偡偗傟偳丄俹俬俠侾俇俥俉俉偵偮偄偰偼俵俹俴俙俛偵僶僌偑偁傞傛偆偱偡丅
巹偼晛抜偼俵俹俴俙俛丂俬俢俤丂倴俈丏俁侾傪巊偭偰偄傞偺偱偡偑丄偦偙偱婥偑偮偄偨僶僌偼丄擮偺偨傔妋擣偟偰傒偨偲偙傠丂倴俉丏係偱傕摨偠偱偟偨丅
俠倧値倖倝倗倳倰倕偺俽倕倢倕們倲丂俢倕倴倝們倕偱俹俬俠侾俇俥俉俉傪慖傫偩偆偊偱丄俹俬俠侾俇俥俉俉偺僜乕僗僾儘僌儔儉乮忋偺僾儘僌儔儉椺偺傛偆側乯傪傾僙儞僽儖偡傞偲丄偳偆偄偆傢偗偐丄們倧値倖倝倗偑娫堘偭偰偄傞丄偲偄偆僄儔乕儊僢僙乕僕偑偱偰偟傑偄傑偡丅
僨僶僀僗傪乮僂僜偱偡偗傟偳乯俹俬俠侾俇俥俉係偲偐俹俬俠侾俇俥俇俀俉偵偟偰丄摨偠僾儘僌儔儉傪傾僙儞僽儖偡傞偲丄乽僨僶僀僗偺愝掕偑堘偭偰傞偠傖側偄偺乿偲偄偆寈崘儊僢僙乕僕偑弌傑偡偗傟偳丄惓偟偔廔椆偟偰俫俤倃僼傽僀儖偑嶌惉偝傟傑偡丅
偁丅巹偼柺搢側偙偲偑寵偄偱偡偺偱丄俹倰倧倞倕們倲偺愝掕側偳偼慡晹柍帇偟偰丄偄偒側傝僜乕僗僾儘僌儔儉傪俷倫倕値偟偰乮傑偨偼偄偒側傝俶倕倵丂俥倝倢倕傪俷倫倕値偟偰丄偦偙偵僜乕僗僾儘僌儔儉傪彂偄偰偟傑偭偰乯丄俹倰倧倞倕們倲仺俻倳倝們倠俛倳倝倢倓偱娙扨堦敪傾僙儞僽儖傪嵪傑偣偰偟傑偭偰偄傑偡丅
偦偺偙偲偲丄僶僌偲偼懡暘娭學側偄偲偼巚偄傑偡偑丅
乵俀侽侾侽丏係丏俀俈拲婰乶
僶僌偱偼偁傝傑偣傫偱偟偨丅娫堘偭偰偄偨偺偼丄偙偺巹偺傎偆偱偟偨丅
俹俬俠侾俇俥俉俉偺俠俷俶俥俬俧偺彂偒曽偑埆偐偭偨偺偱偡丅
壓偺俹俬俠僾儘僌儔儅偱昞帵偝傟偨儊僢僙乕僕傕丄偦偺俠俷俶俥俬俧偺彂偒曽偵娭學偟偰偄傑偟偨丅
徻偟偔偼乵戞係俉俉夞乶傪偛嶲徠偔偩偝偄丅
乵拲婰偙偙傑偱乶
仠側傫偲俹俬俠僾儘僌儔儅偱傕僶僌偑丠
廐寧偺俹俬俠僾儘僌儔儅偱丄崱夞偺僥僗僩僾儘僌儔儉傪俹俬俠侾俇俥俉俉偵彂偒崬傕偆偲偡傞偲丄婥帩偪偺埆偄寈崘儊僢僙乕僕偑弌傑偡丅
偙傫側昞帵偑弌傑偡丅
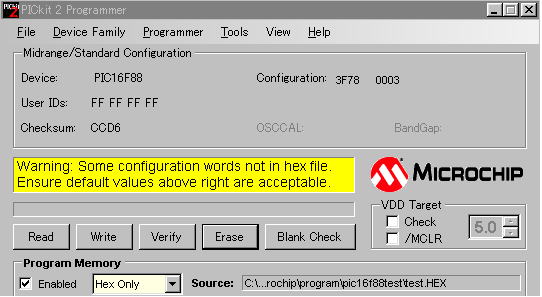
傾僙儞僽儖屻偺儕僗僩偱妋擣偟偰傒傑偟偨偑丄俠倧値倖倝倗偺婡夿岅僐乕僪偵娫堘偄偼偁傝傑偣傫偟丄偦傟偼偙偙偱昞帵偝傟偰偄傞俁俥俈俉偵娫堘偄偁傝傑偣傫乮偙傟偼倓倕倖倎倳倢倲偱偼側偔偰丄偁偔傑偱忋偺僥僗僩僾儘僌儔儉偺俠俷俶俥俬俧偱愝掕偟偨抣偱偡乯丅
偙偙偼柍帇偟偰丄彂偒崬傒傪偟偰偟傑偆偲丄壗帠傕柍偔俷俲偵側傝傑偡丅
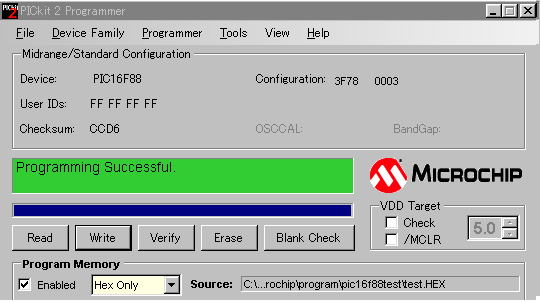
傕偪傠傫惓偟偔幚峴偱偒傞偙偲偼丄偝偒傎偳偍尒偣偟偨幨恀偺捠傝偱偡丅
仠俹俬俠侾俇俥俉俉偺俹俷俼俿俛偵偮偄偰
崱夞偺僥僗僩僾儘僌儔儉傪彂偄偰帋偟偰傒傞夁掱偱婥偑偮偄偨偙偲偑偁傝傑偡丅
忋偺曽偱偍尒偣偟偨夞楬恾偱丄俼俛侽抂巕偵侾侽俲兌偺僾儖傾僢僾掞峈偑偮偗偰偁傝傑偡丅
偙傟偑側偄偲弌椡偑妋擣偱偒傑偣傫丅
俹俬俠侾俇俥俉俉偺俢倎倲倎丂俽倛倕倕倲偺俹俷俼俿俛偺愢柧偱偼丄偳偙偵傕僆乕僾儞僪儗僀儞偱偁傞丄偲偼彂偄偰偁傝傑偣傫丅
偨偩俹俷俼俿俛偺僽儘僢僋恾傪傒傞偲丄偄傠偄傠側弌椡傗擖椡傗傜偑侾偮偺僺儞偵暋崌偝傟偰偄偰丄偦偺夞楬偺摦嶌偵傛偭偰偼僆乕僾儞僪儗僀儞偵側偭偰偟傑偆偐傕丄偲媈偆梋抧偼廫暘偵偁傝傑偡丅
偙偺偁偨傝傕丄偙偲俹俬俠侾俇俥俉俉偵偮偄偰偼丄偐側傝妋擣偟偰巊傢側偗傟偽婜懸捠傝偵偼摦偄偰偔傟側偄丄偲偄偆壜擻惈偑偁傞傛偆偵巚偊傑偡丅
僋儕僗僞儖側偟偱嵪傓偲偄偆偁偨傝偼丄側偐側偐偵幪偰偑偨偄俬俠偱偼偁傞偺偱偡偑乧丅
偲偄偆偙偲偱丄杮擭偼偙傟偱廔傢傝偱偡丅
崱擭堦擭丄偍晅偒崌偄偄偨偩偒桳擄偆偛偞偄傑偟偨丅
棃擭傕攞媽偺偍堷偒棫偰傪偍婅偄偄偨偟傑偡丅
巹偲偄偨偟傑偟偰傕丄偝偡偑偵怴擭惓寧偔傜偄偼偪傚偄偲偺傫傃傝偟偨偄偲巚偄傑偡偺偱乮偦傫側偙偲傪尵偄側偑傜丄偒偭偲尦扷偐傜丄倀俽俛偺捛媦夝柧側偳傪偛偦偛偦傗偭偨傝偟偰乧乯丄怴擭偺峏怴奐巒偼惓寧柧偗偐傜丄偲偄偆偙偲偵側傞偲巚偄傑偡丅
奆條丅傛偄偍擭傪偍寎偊偔偩偝偄傑偣丅
俀侽侽俋丏侾俀丏俁侾倳倫倢倧倎倓
俀侽侾侽丏係丏俀俈捛婰
俀侽侾侾丏俆丏係拲婰
慜傊
師傊
儂乕儉儁乕僕僩僢僾傊栠傞