
 LEGOマインドストームが面白くて色々作っていた中の集大成的な作品です。
かなり大柄なロボットなので鈍重ですが、一応二足歩行に成功しました。
LEGOマインドストームが面白くて色々作っていた中の集大成的な作品です。
かなり大柄なロボットなので鈍重ですが、一応二足歩行に成功しました。
LEGOマインドストームが面白くて色々作っていた中の集大成的な作品です。
かなり大柄なロボットなので鈍重ですが、一応二足歩行に成功しました。
LEGOマインドストームが面白くて色々作っていた中の集大成的な作品です。
かなり大柄なロボットなので鈍重ですが、一応二足歩行に成功しました。

 主な構造
主な構造
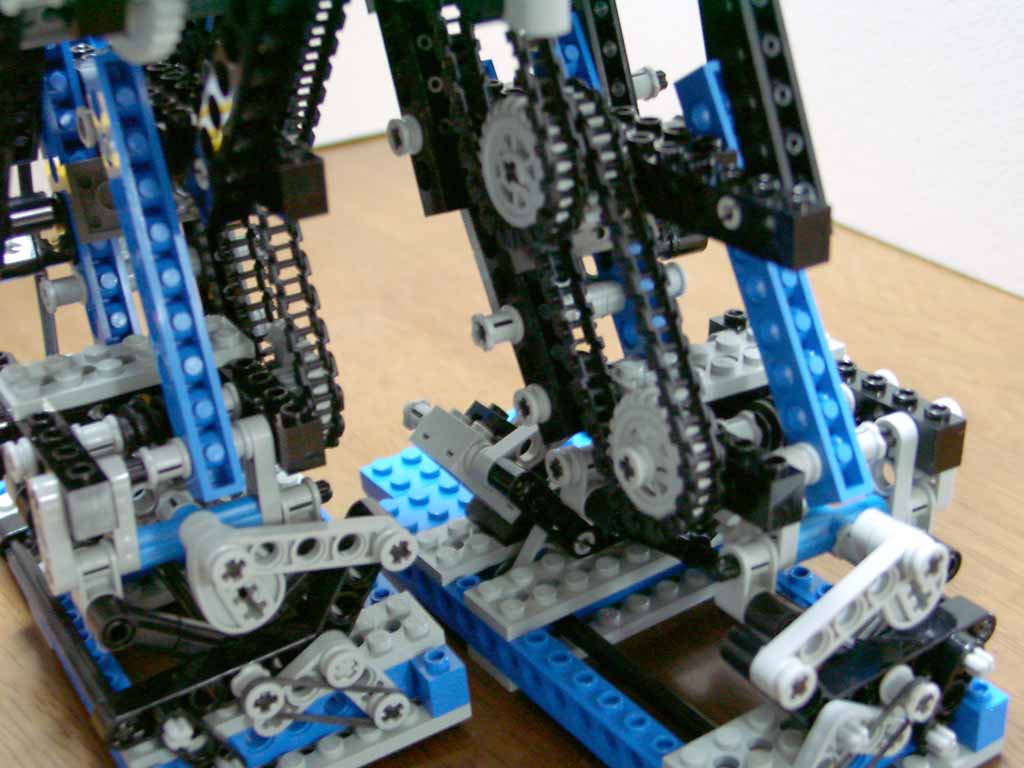 足首の左右傾斜は胴体に設置されたモーターから動力を伝達しています。
足首の左右傾斜は胴体に設置されたモーターから動力を伝達しています。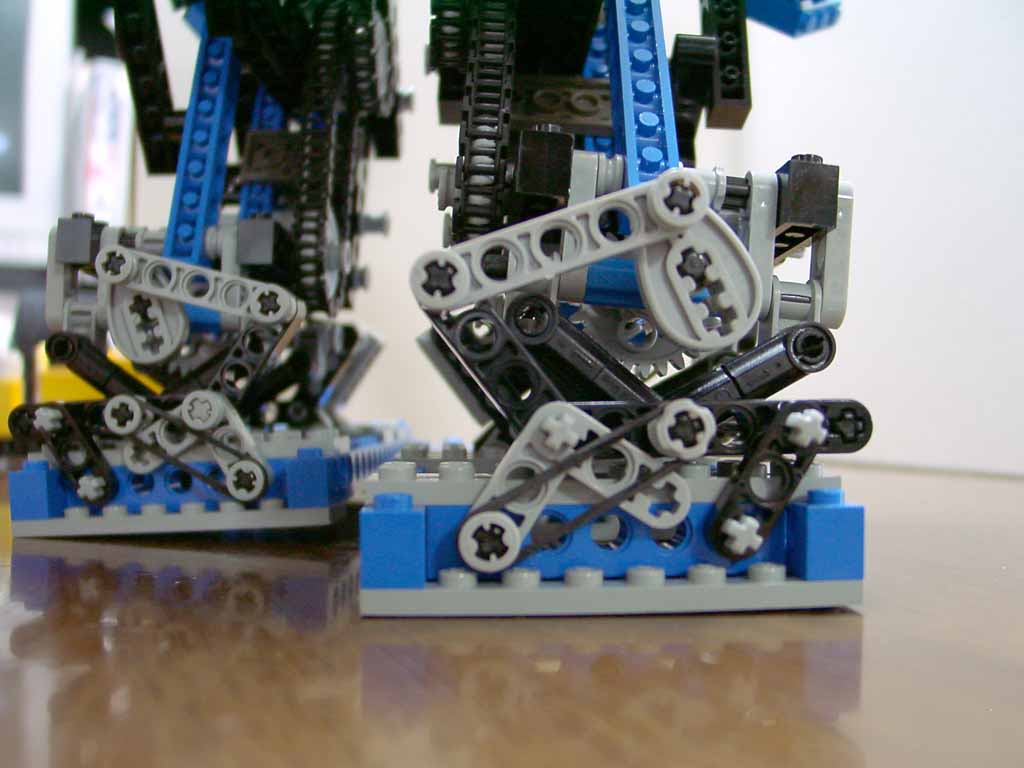
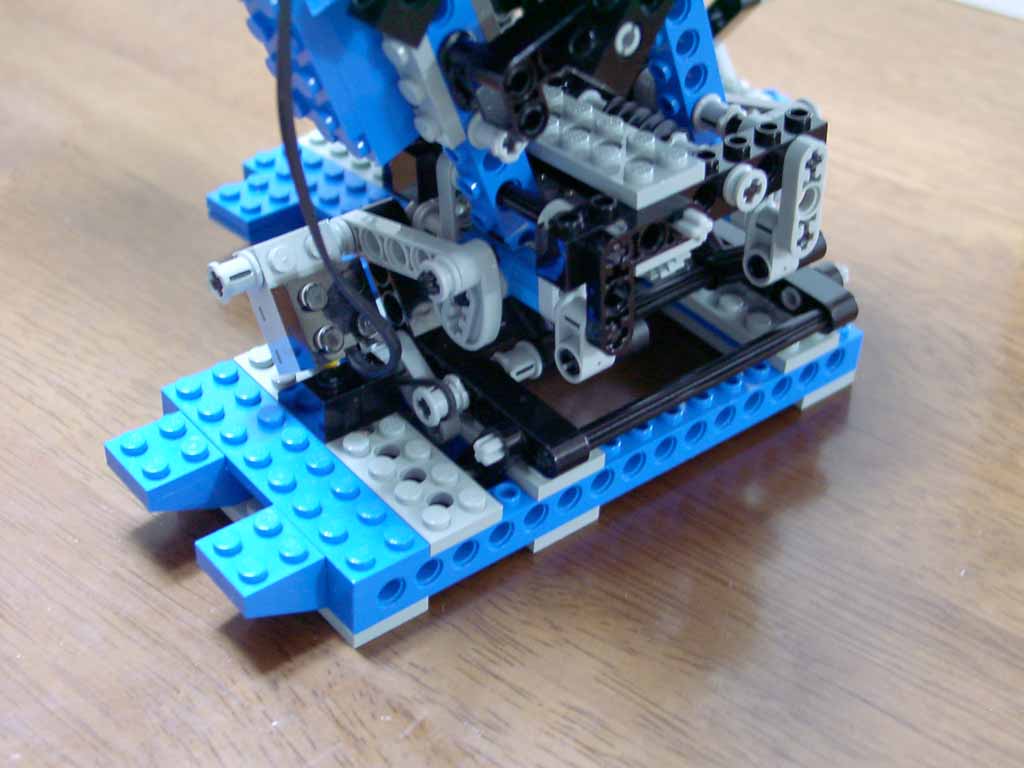 足裏は輪ゴムのテンションで浮いていて、接地した際にスイッチで検出するようになっています。
足裏は輪ゴムのテンションで浮いていて、接地した際にスイッチで検出するようになっています。